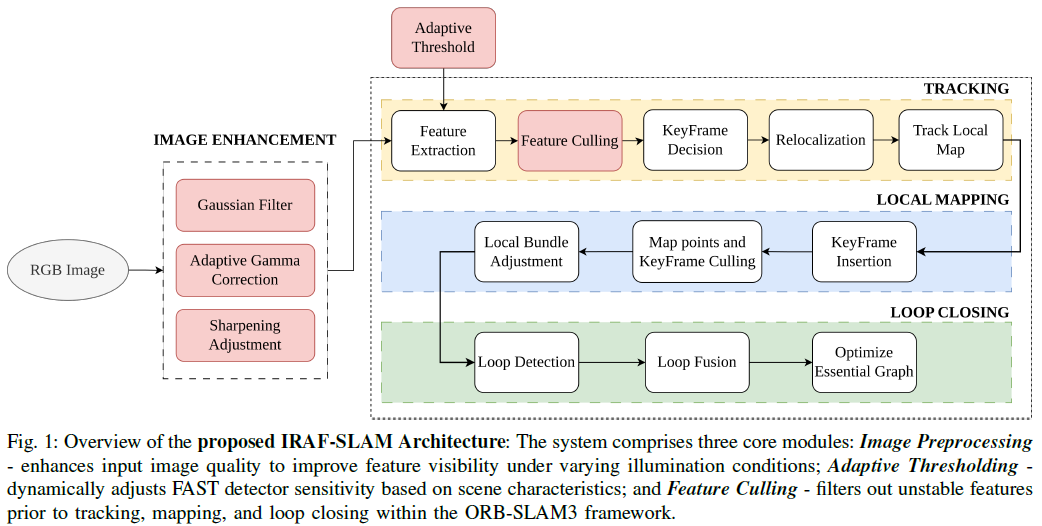
具备光照鲁棒和自适应特征剔除的VSLAM前端框架

一种实时多线程VSLAM框架vS-Graphs介绍

用于黑暗中视觉自我运动估计的新型主动照明框架

一个动态环境下的实时语义RGB-D SLAM系统
视觉SLAM助推服务机器人再进化
机器人定位是如何实现的?

基于事件相机的vSLAM研究进展
深度解读!VSLAM与VIO的3D建图,重定位与世界观综述
SC-Depth系列的网络都解决了什么问题以及实现了什么效果
VSLAM系统方法的各种特点

 下载APP
下载APP
 搜索内容
搜索内容
