
以太网PHY硬件连接 以太网PHY驱动软件配置介绍

PT/PVT运动模式介绍:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十一)

EtherCAT转CANopen网关在工业领域的应用方法
超高实时性的EtherCAT运动控制卡——PCIE464
TLT507-IgH EtherCAT主站开发案例
ethercat总线伺服如何控制 EtherCAT运行原理
EtherCAT和ethernet通信协议的区别
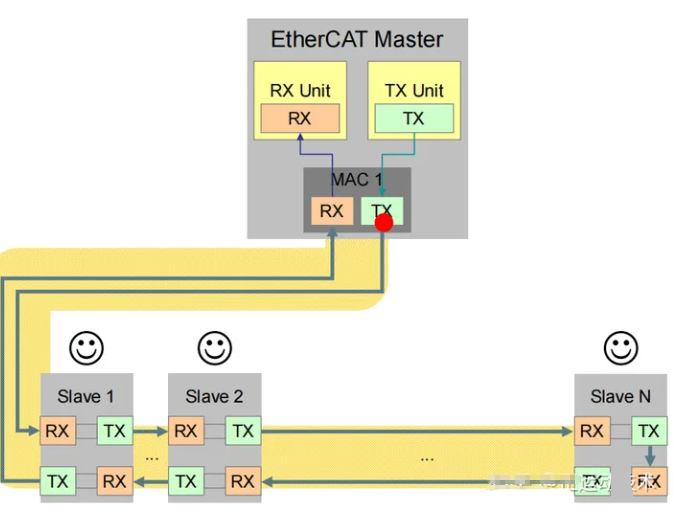
基于以太网的EtherCAT协议技术
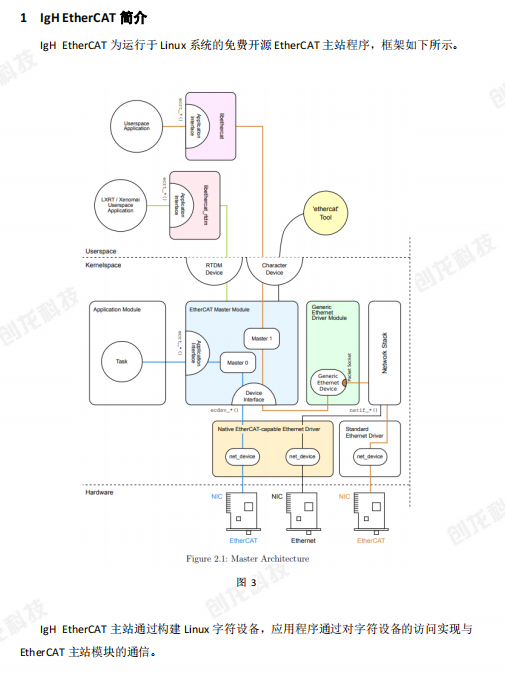
TL3588-IgH EtherCAT主站开发案例
项目工程下载与XML配置文件下载:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十)
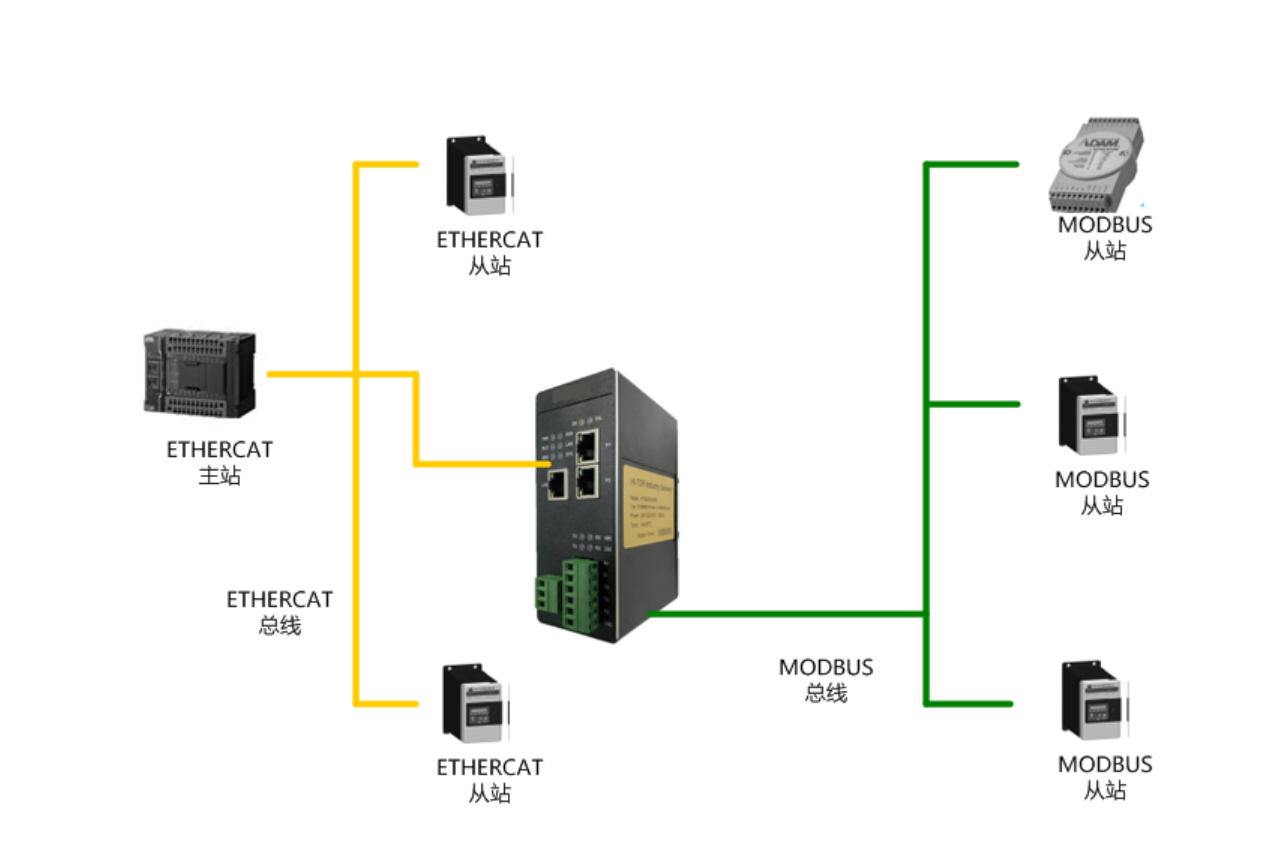
小疆智控Ethercat转ModbusRTU网关连接马达保护器配置案例
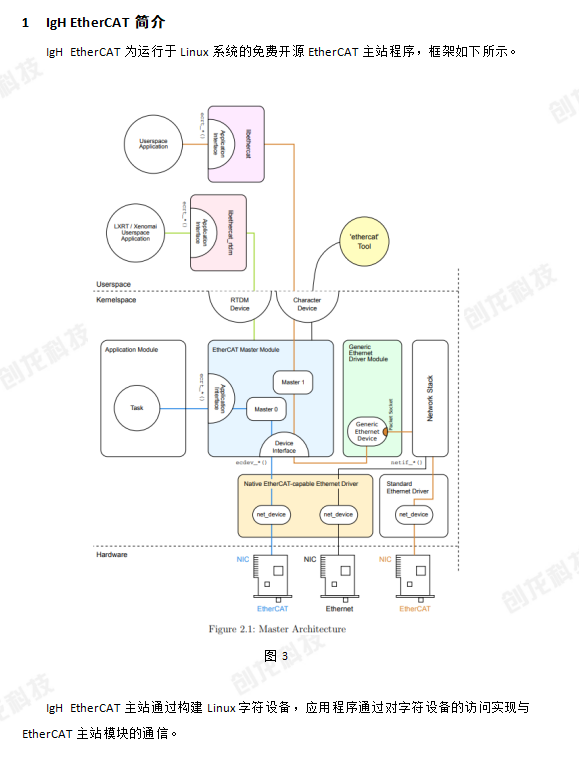
RK3568-IgH EtherCAT主站开发案例

通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯
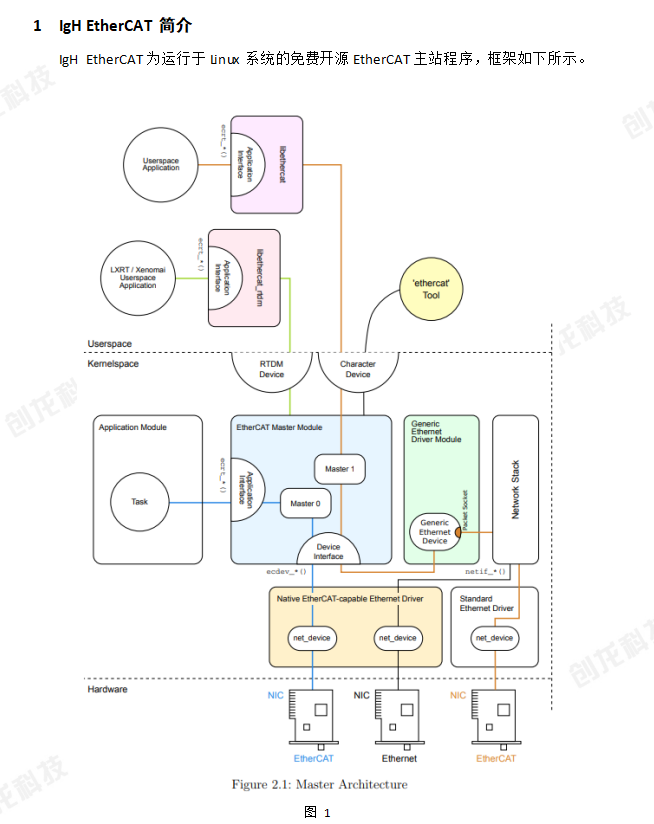
TLT113-MiniEVM-IgH EtherCAT主站开发案例
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT驱动器回零与控制器回零:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯
二维/三维的多轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(八)
单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(七)

 下载APP
下载APP
 搜索内容
搜索内容
