


NDEMIND以消费级具身大脑重构家用机器人空间认知
INDEMIND三大AI平台助推机器人产业革新
INDEMIND亮相联想集团首届创新加速器开放日
INDEMIND四大伙伴消费级AI机器人亮相CES 2026
INDEMIND助力会畅科技旗下OLLOBOT机器人OlloNi亮相CES 2026
INDEMIND邀您相约CES 2026国际消费电子展

FPGA和GPU加速的视觉SLAM系统中特征检测器研究
INDEMIND视觉空间智能重构扫地机器人清洁逻辑
INDEMIND解锁陪伴机器人能力新边界

全新轻量级ViSTA-SLAM系统介绍
INDEMIND脏污识别技术赋能扫地机器人功能进化

一种适用于动态环境的自适应先验场景-对象SLAM框架
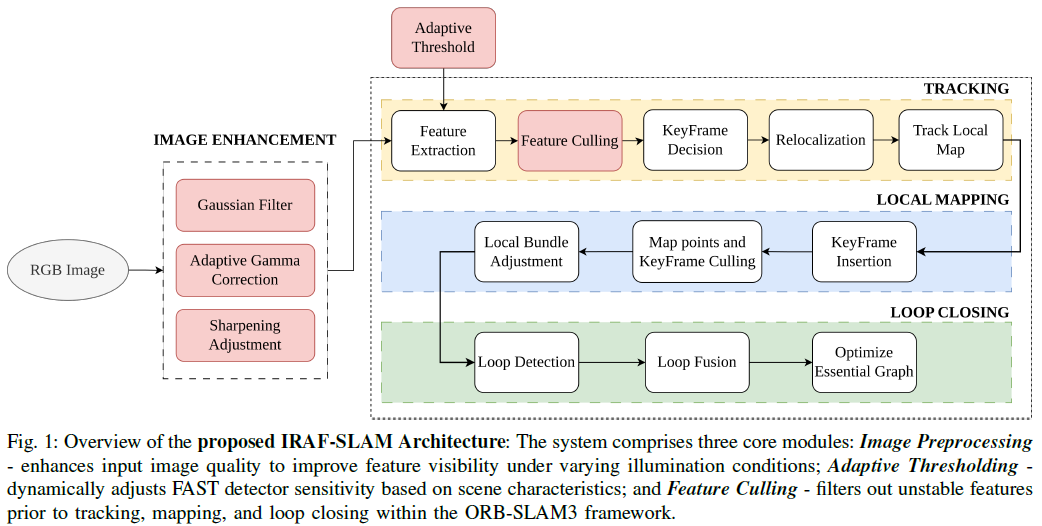
具备光照鲁棒和自适应特征剔除的VSLAM前端框架

基于深度学习的增强版ORB-SLAM3详解

一种适用于动态环境的实时RGB-D SLAM系统

一种适用于动态环境的3DGS-SLAM系统

三维高斯泼溅大规模视觉SLAM系统解析
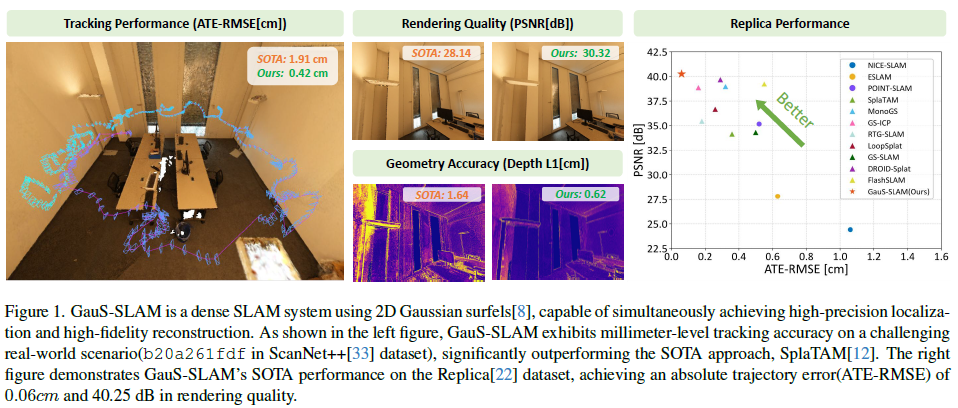
基于高斯的稠密视觉SLAM研究

一种新型激光雷达惯性视觉里程计系统介绍

一种实时多线程VSLAM框架vS-Graphs介绍