
资料下载


蓝牙控制的拾放机器人
h1708587244.0670
分享资料个
描述
介绍
本教程演示如何构建一个由您的 Android 智能手机控制的拾取和放置机器人。我们使用 MIT App Inventor 平台构建了一个移动应用程序。在本教程中,我们将分别讨论这个项目的每个部分。我们将讨论:
- 1 如何控制伺服电机
- 2 如何控制直流电机
- 3 如何使用蓝牙模块
- 4 如何用你的手机控制你的机器人
因此,我希望本教程涵盖您构建机器人的所有需求。
情景
首先,我们要知道机器人是如何接单的。我们正在使用一个蓝牙模块,该模块将连接到我们将在之后构建的移动应用程序。现在我们需要知道我们将使用蓝牙连接通过手机向机器人发送命令。

硬件
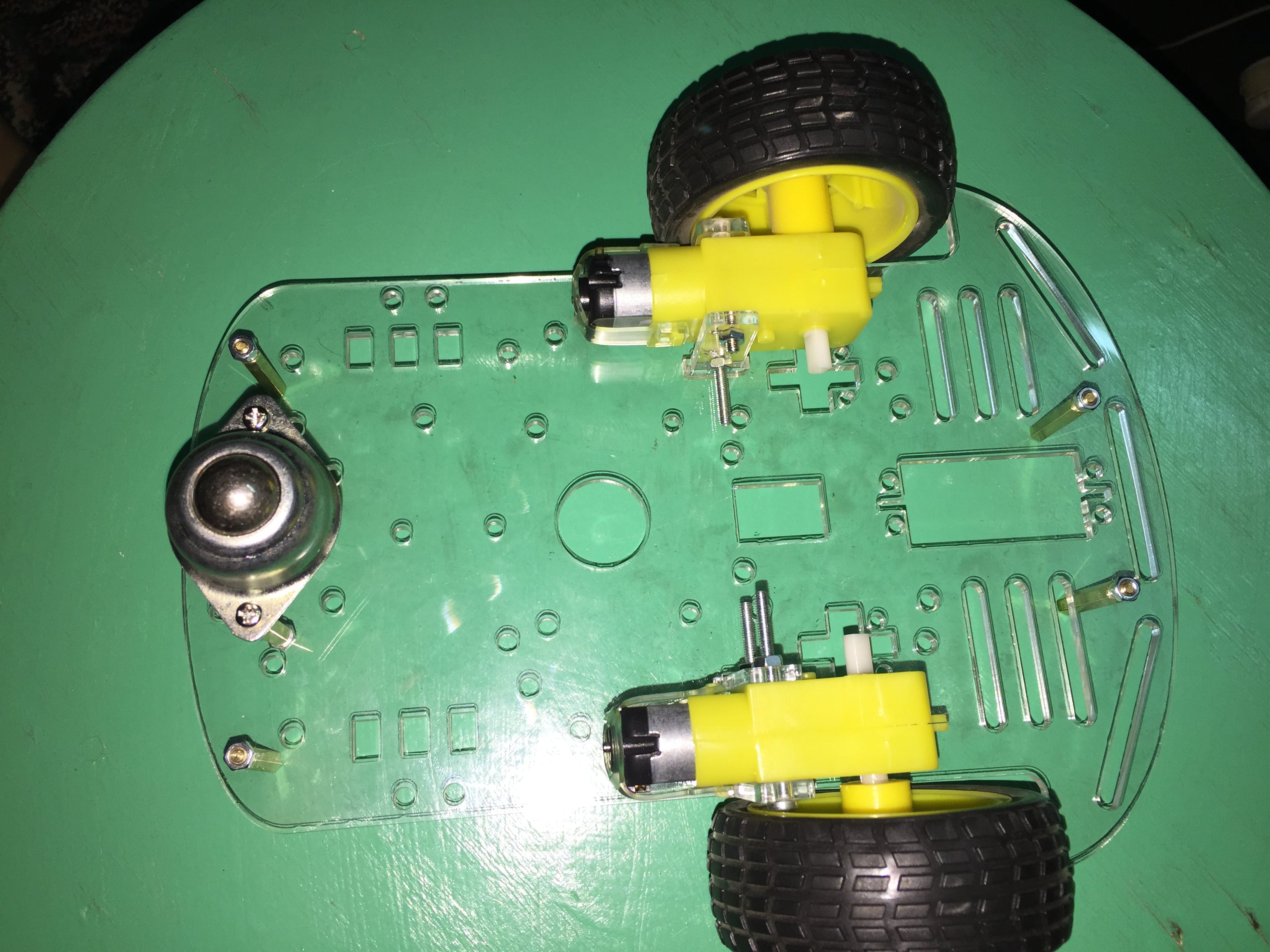
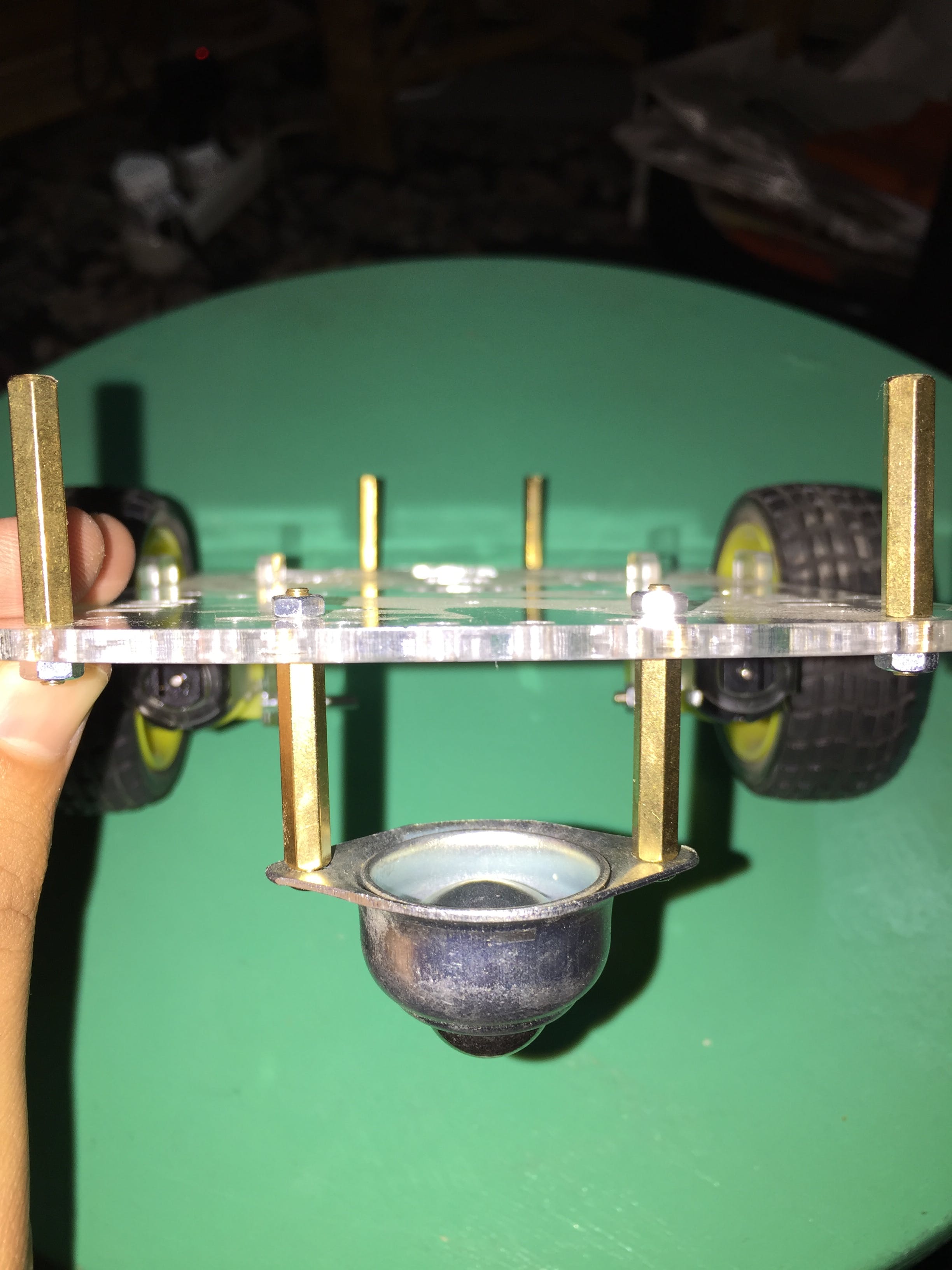
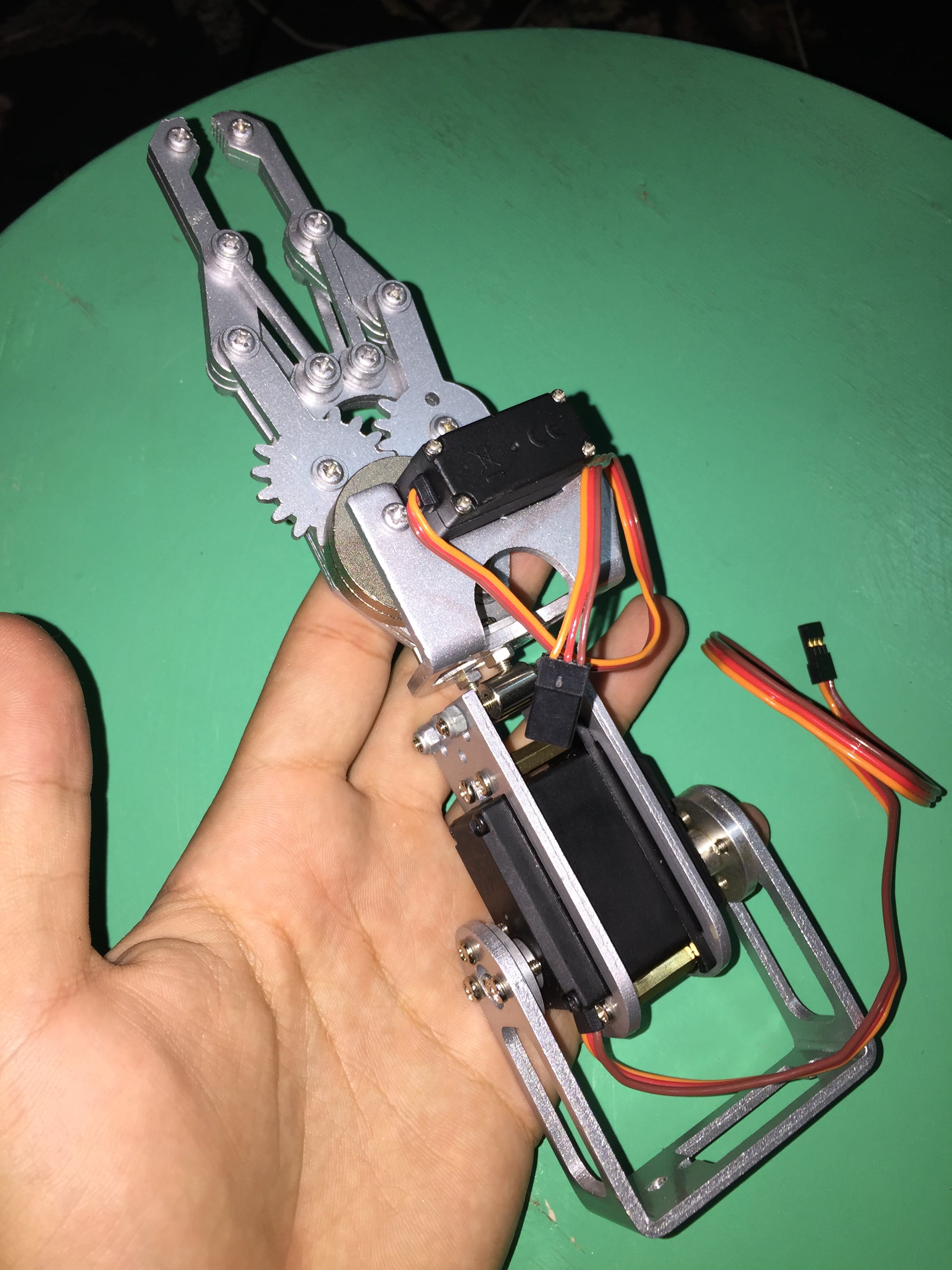
- 该套件需要一些简单的组装,但确实需要一些时间。按照套件随附的说明进行组装,
在组装结束时,它应该如下所示:
Motor Shield 可让您与电机交谈。如果将电机直接连接到 Arduino 板,它会起火!因为每个电机至少需要 80MA,但数字 Arduino 引脚可以提供的最大电流是 40MA,所以不要尝试将电机直接连接到您的 Arduino 板。
- 电机护罩可帮助您控制电机的方向(例如,向前、向后和释放)。
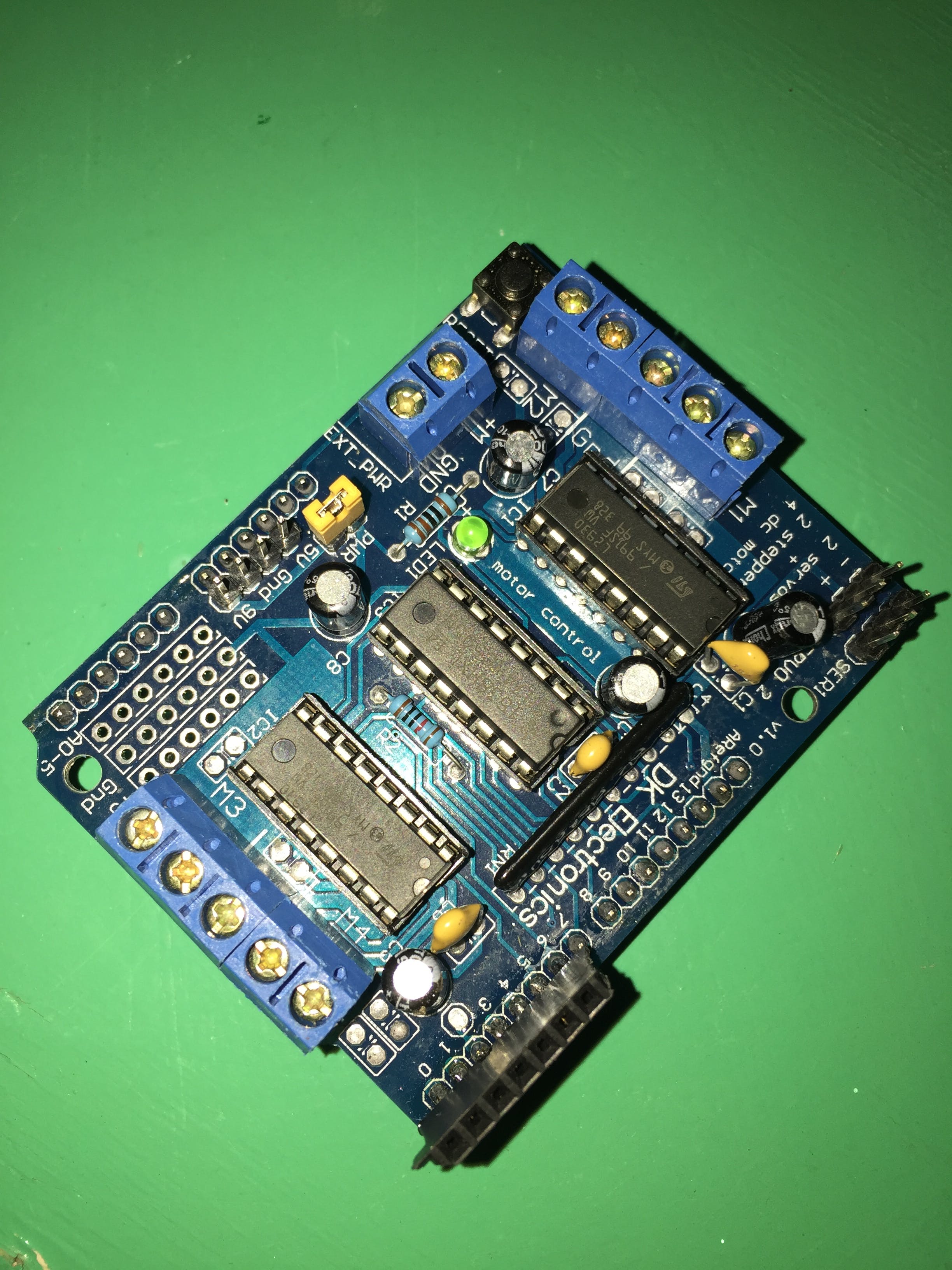
- 电机屏蔽允许您通过单独的 8 位速度选择控制多达 4 个双向直流电机(因此,分辨率约为 0.5%)。
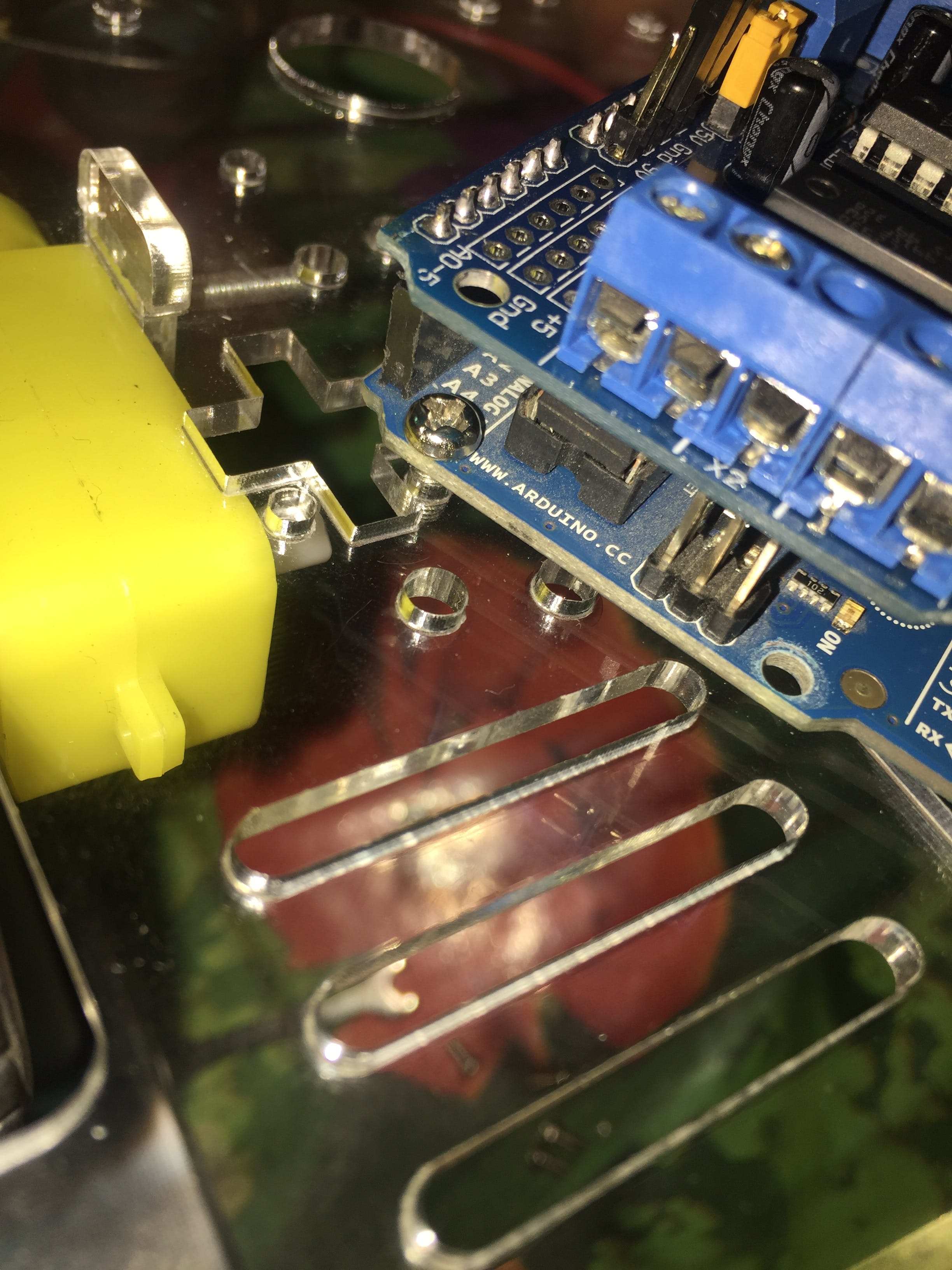
您可以在屏蔽的顶部焊接一些排针,以便能够使用 Arduino 引脚。

您需要将电机护罩贴在 Arduino 板上方,如下所示:
蓝牙模块:它是飞行员和机器人之间发送命令和采取行动的通道。
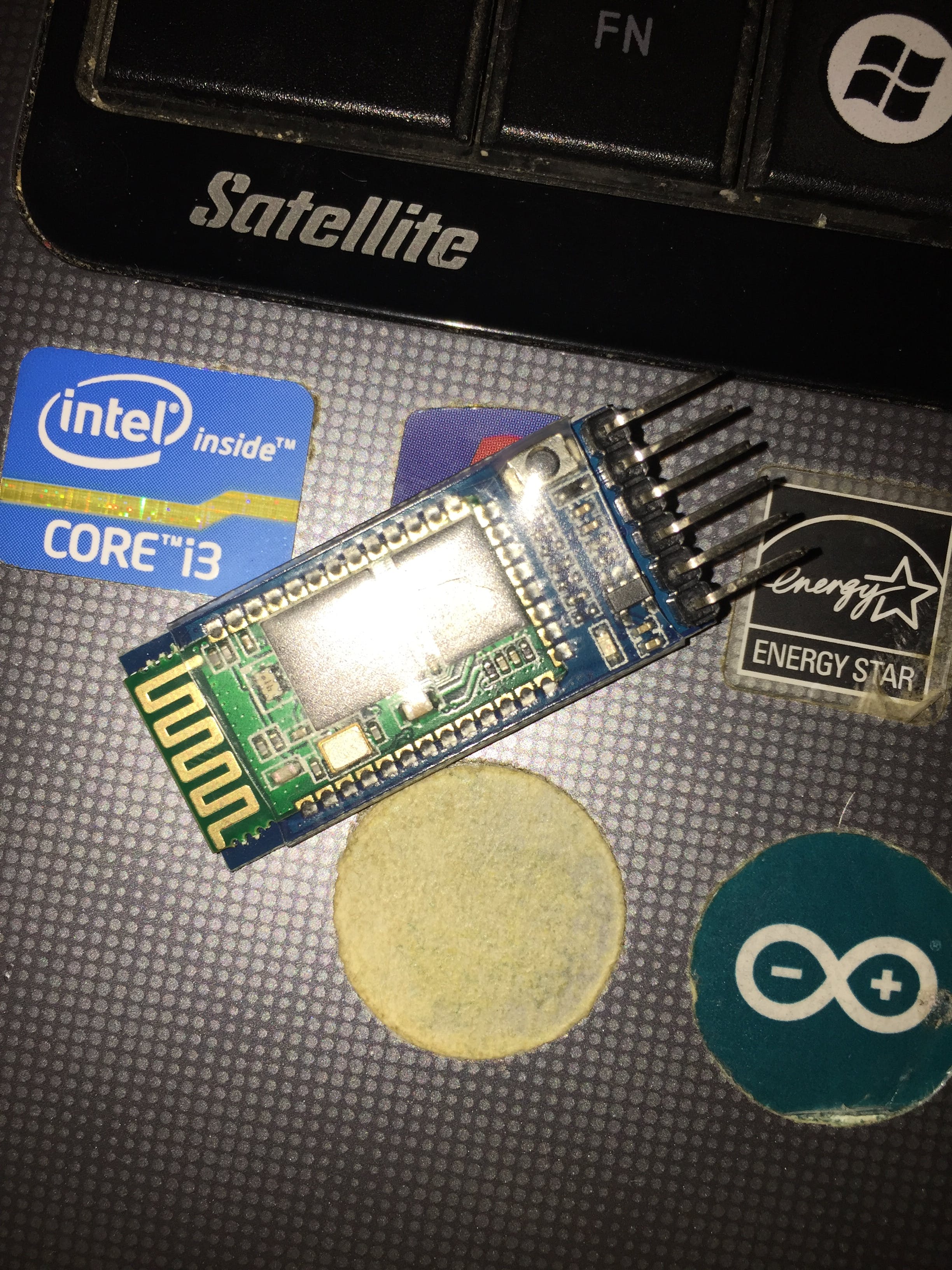
它有6个引脚;我们将只使用中间的四个引脚(RX-TX-GND-+5):
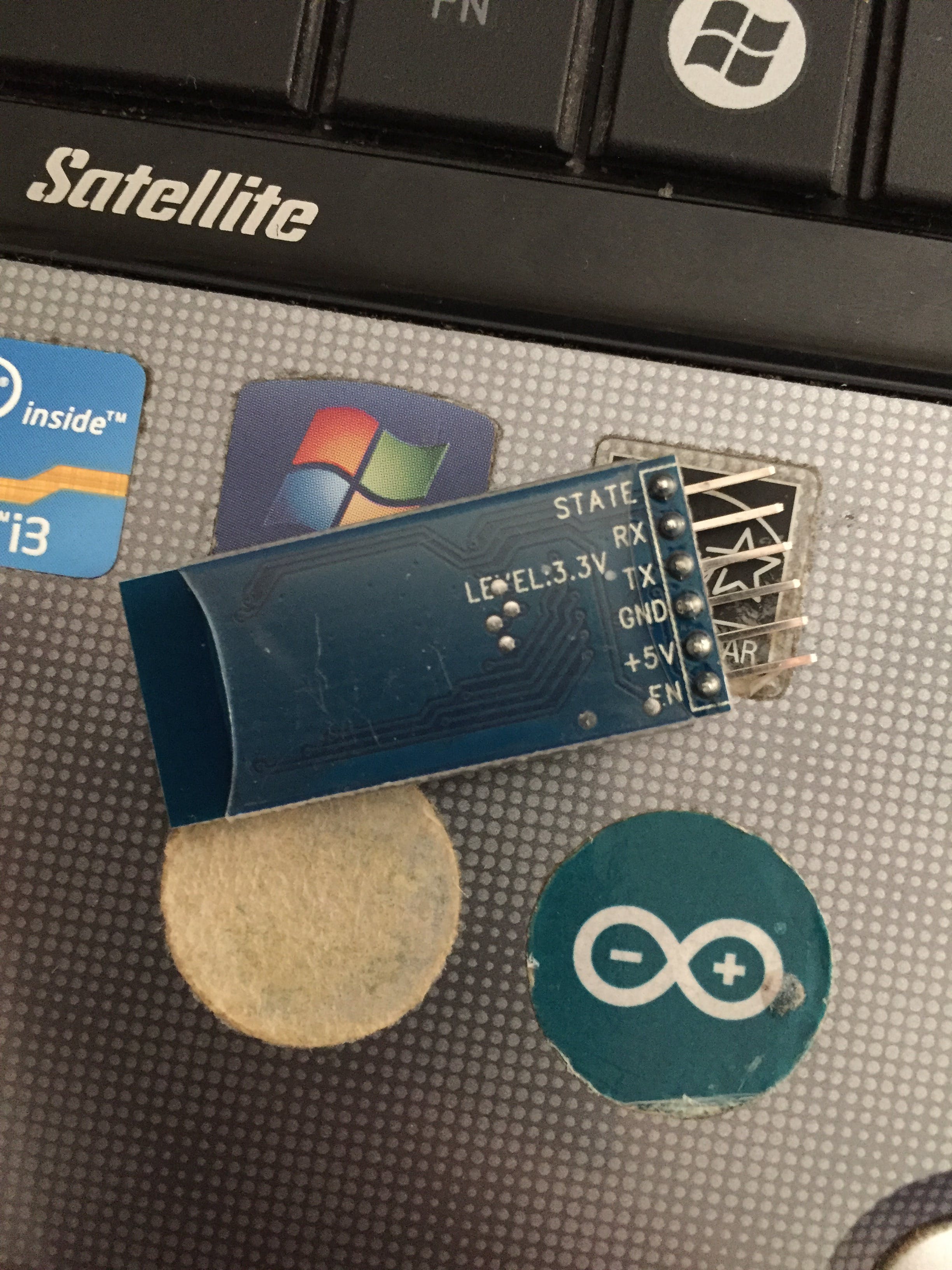
我们将连接:
- 蓝牙模块上的 +5 到 Arduino 上的 5v
- 蓝牙模块上的 GND 到 Arduino 上的 GND
- 蓝牙模块上的 Rx 到 Arduino 上的 Tx
- 蓝牙模块上的 Tx 到 Arduino 上的 Rx
注意:为什么 Rx 到 Tx 和 Tx 到 Rx?
因为蓝牙模块发送数据(Tx)而 Arduino 接收此数据(Rx)。
一个发送,另一个接收
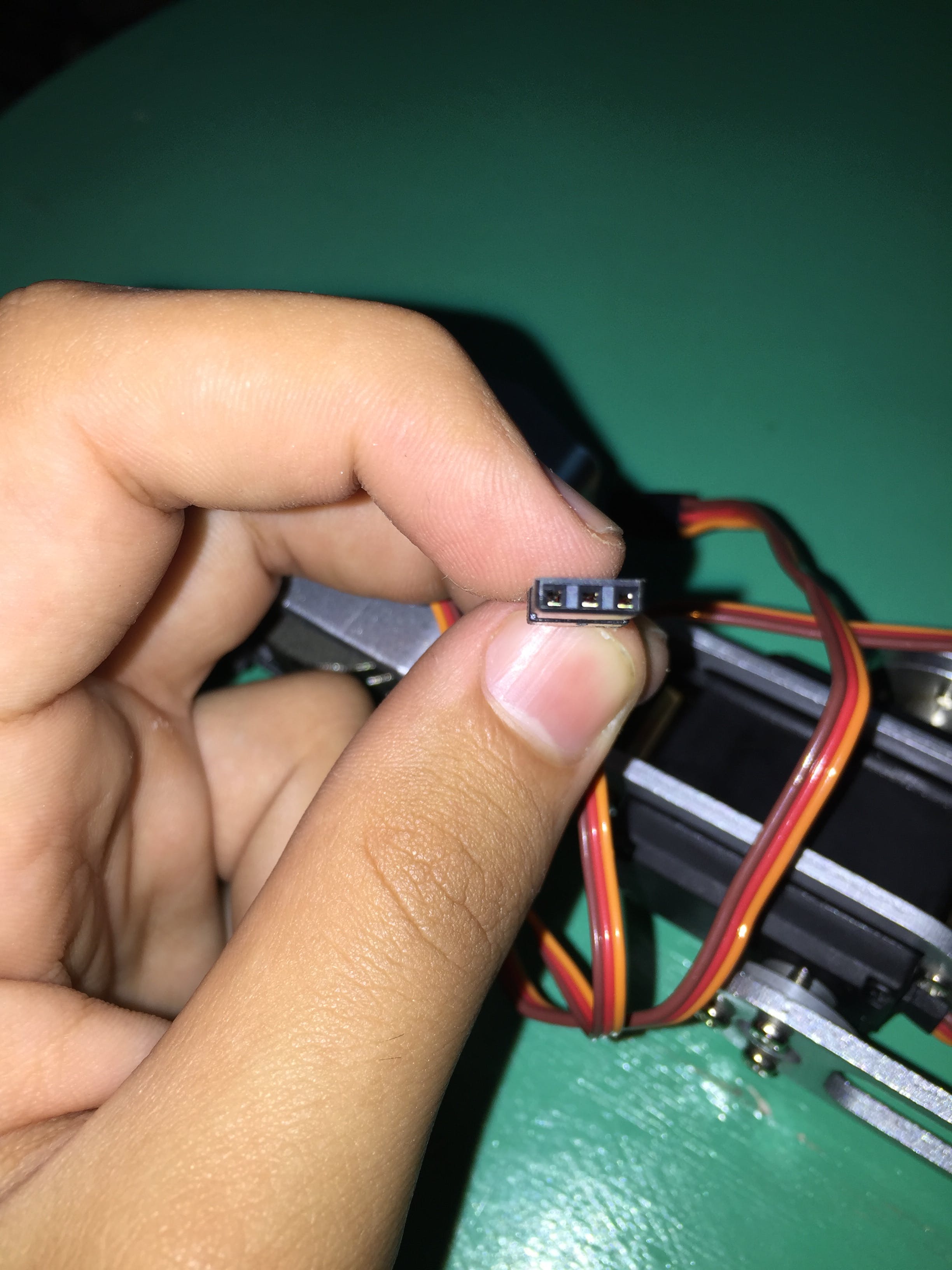
4) 伺服电机有 3 根线:红色(正极)、棕色(负极)、黄色或橙色(信号)。
注意:请勿将伺服电机的正极和负极连接到 Arduino 板的 5V 和 GND。由于电机吸收的大电流,Arduino板会起火;使用外接电池。

- 红线接外接电池正极
- 外接电池负极的棕色线
- 橙色线连接到 Arduino 上的任何数字 (PWN) 引脚
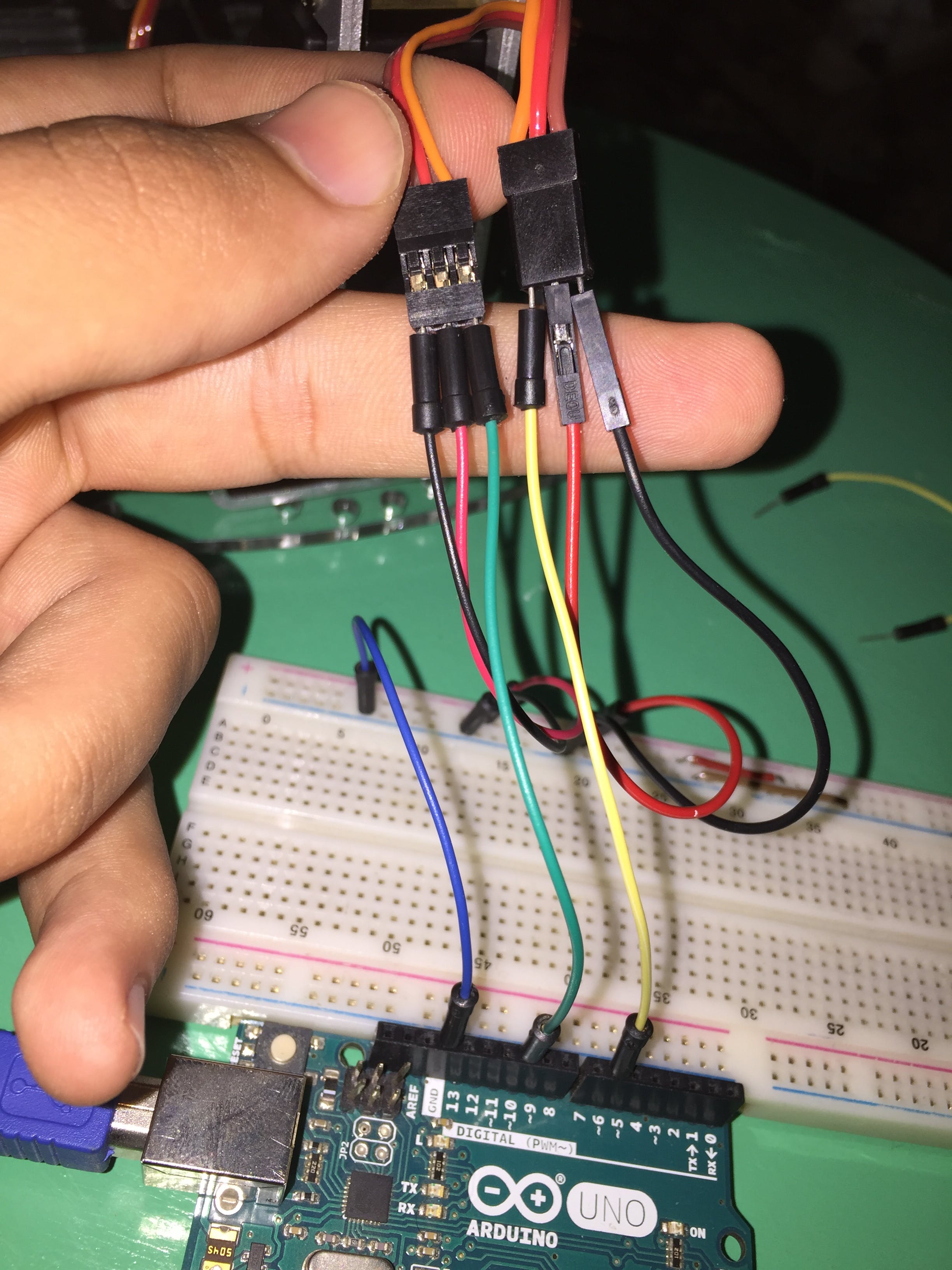
注意:不要忘记将电池的 GND 和 Arduino 的 GND 共用,通过将每个 GND 相互连接来实现。
5) 直流电机
您需要在电机端子上焊接一些电线才能使用这些电机。
直流电机没有极性。没有正面也没有负面。如果你颠倒你的电机连接,电机的运动方向将会改变。

焊接电机端子后,将这些端子连接到电机护罩。
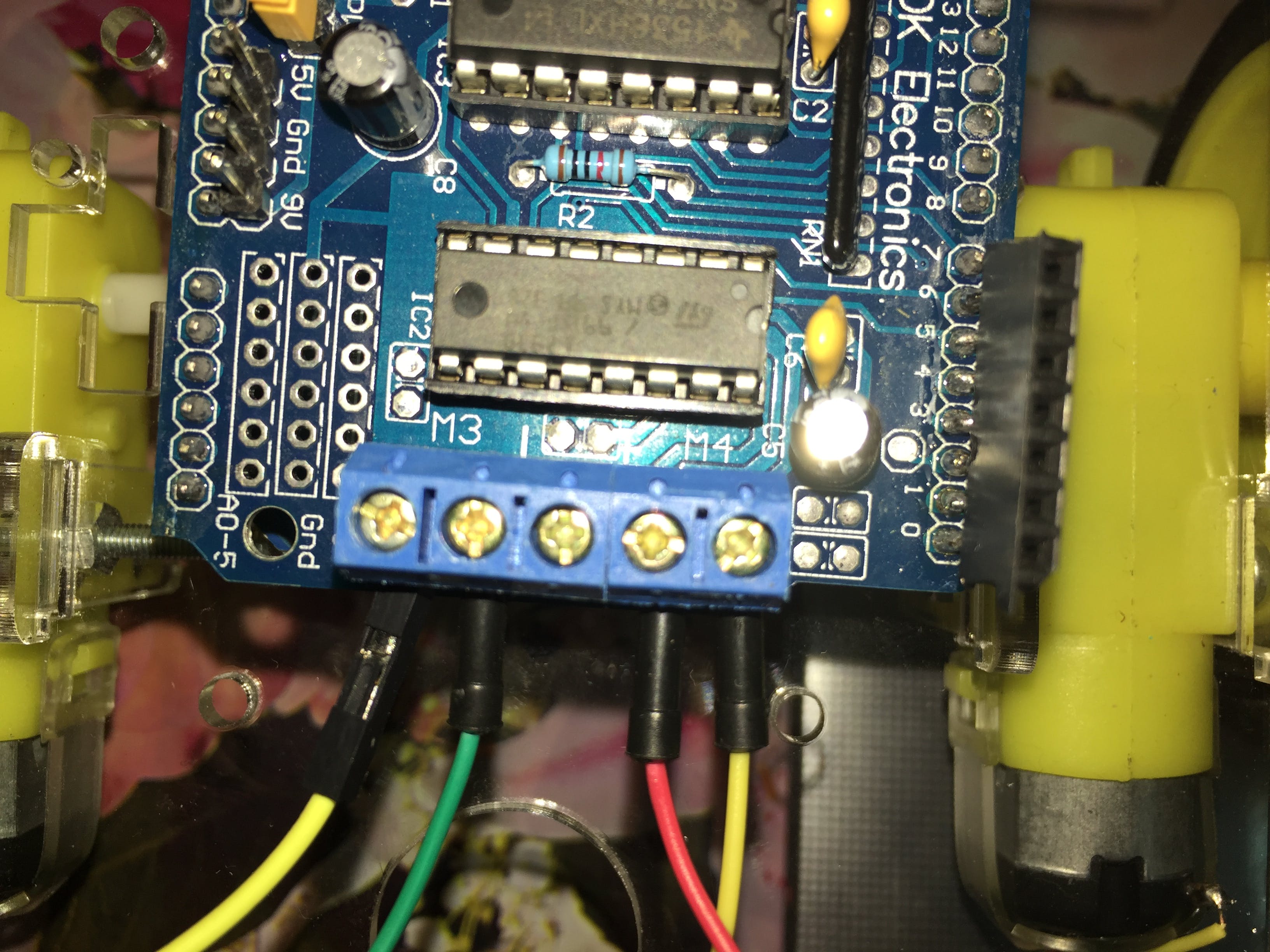
注意:在Arduino 代码中,我使用了电机 1 和电机 2 ,而不是电机 3 和电机 4。
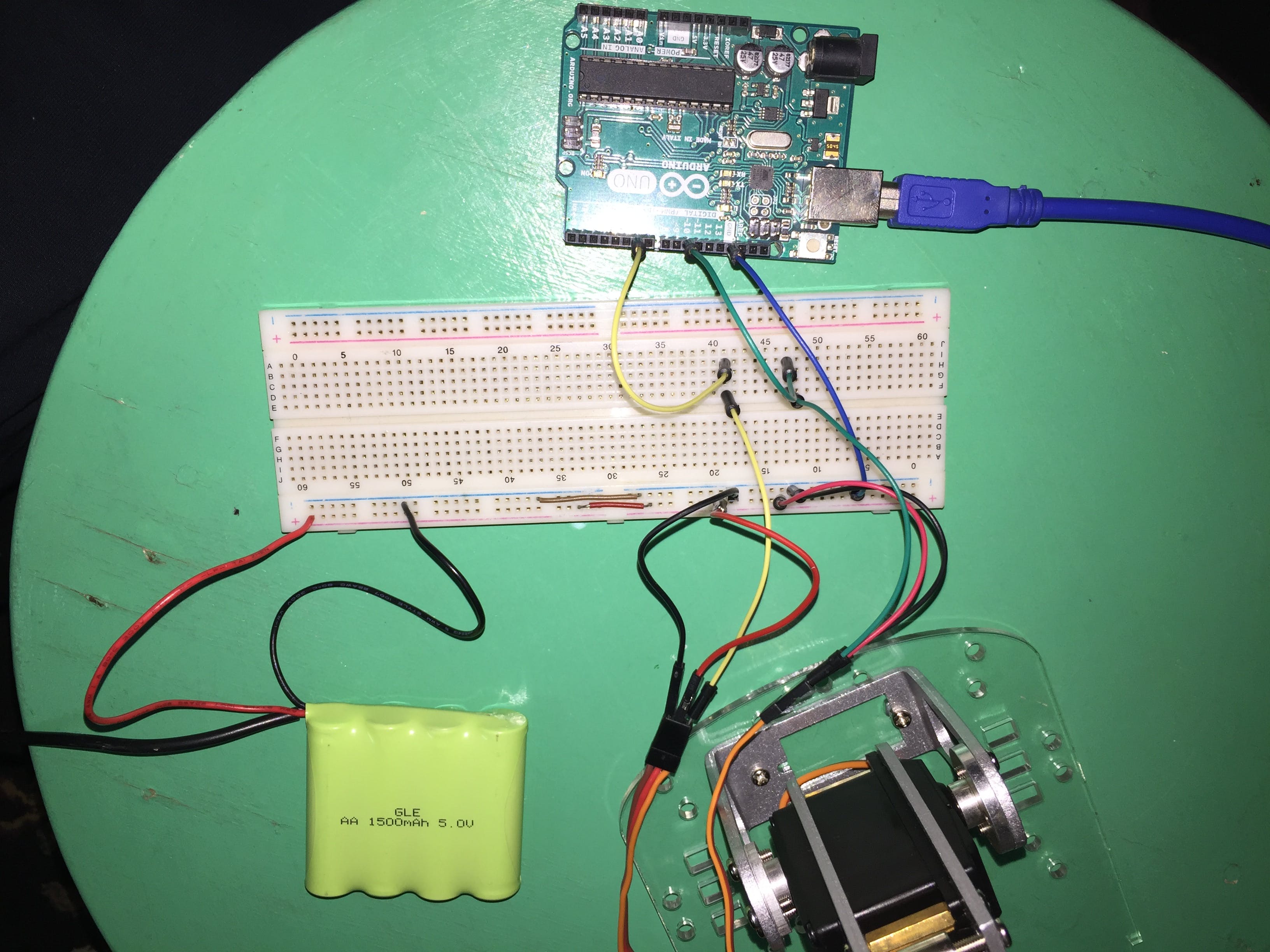
原理图
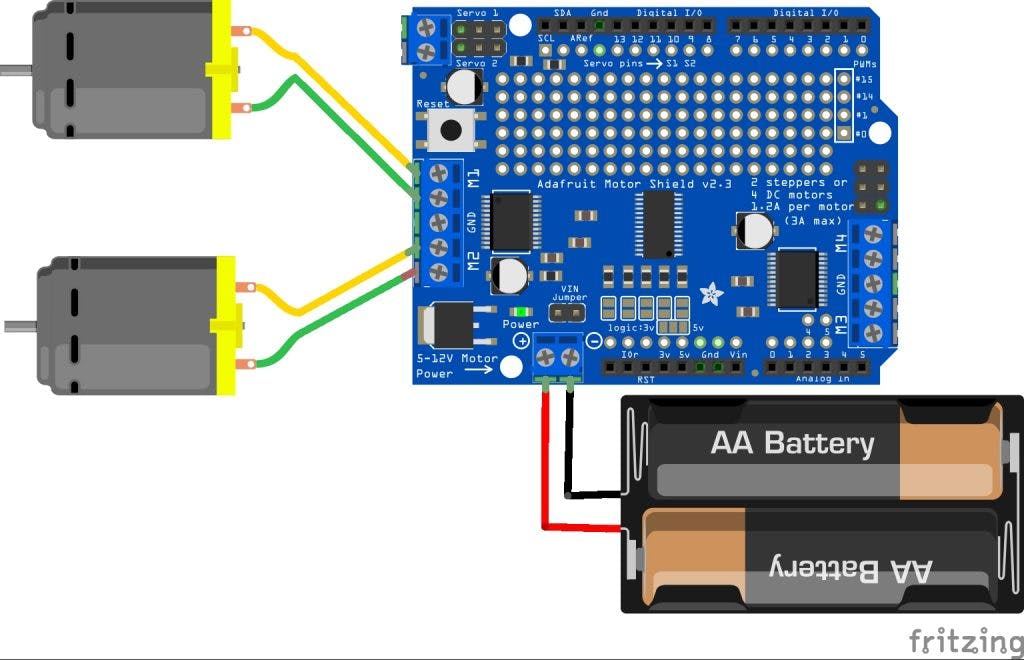
如何将机器人电机和电池与电机驱动器连接起来。
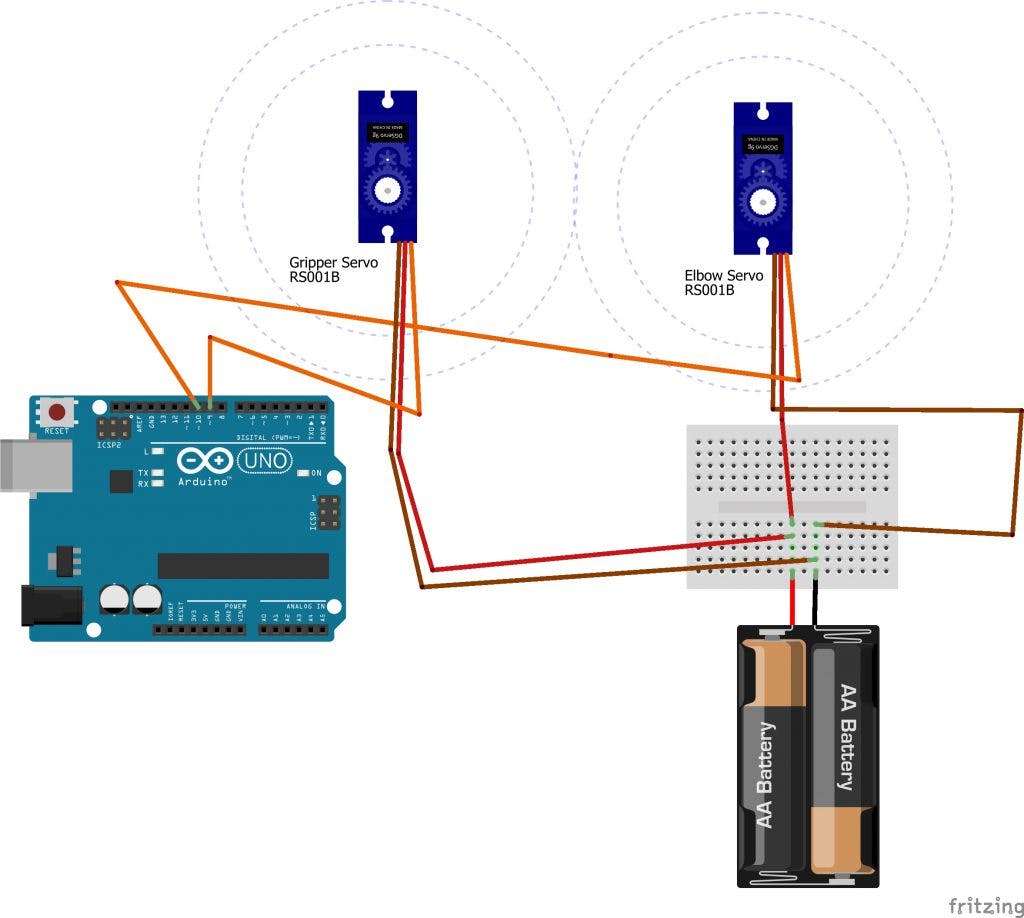
如何将 Arm 伺服电机和电池与 Arduino 板连接。
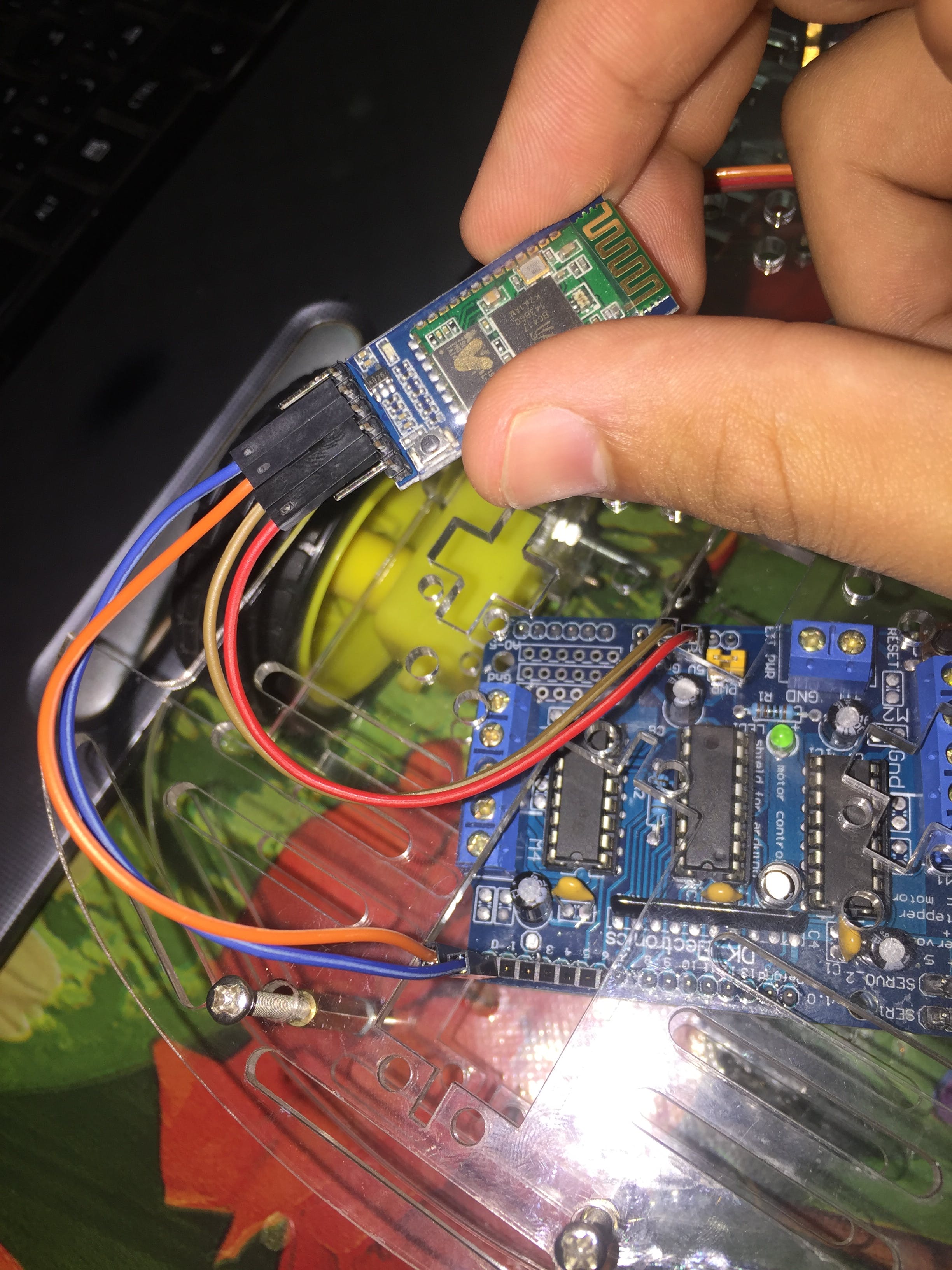
如何将蓝牙模块与 Arduino 板连接。
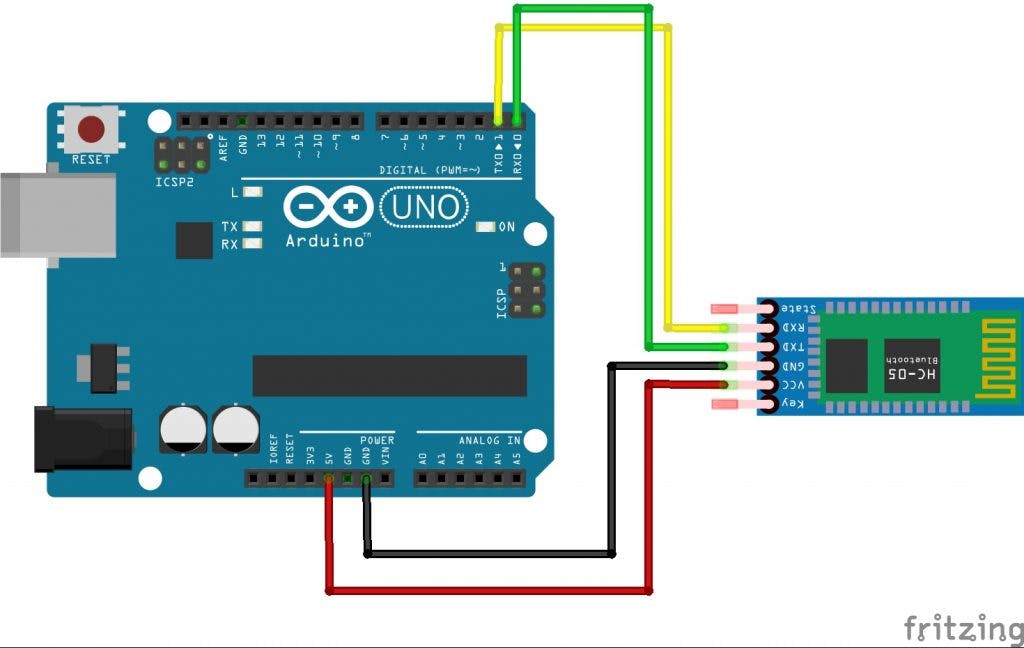
注意:在将代码上传到 Arduino 板时断开(移除 RED WIRE +5 引脚)蓝牙模块。然后在上传过程完成后重新连接。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




