
资料下载


BCR使用L293D来控制机器人底部的驱动电机
符筹荣
分享资料个
描述
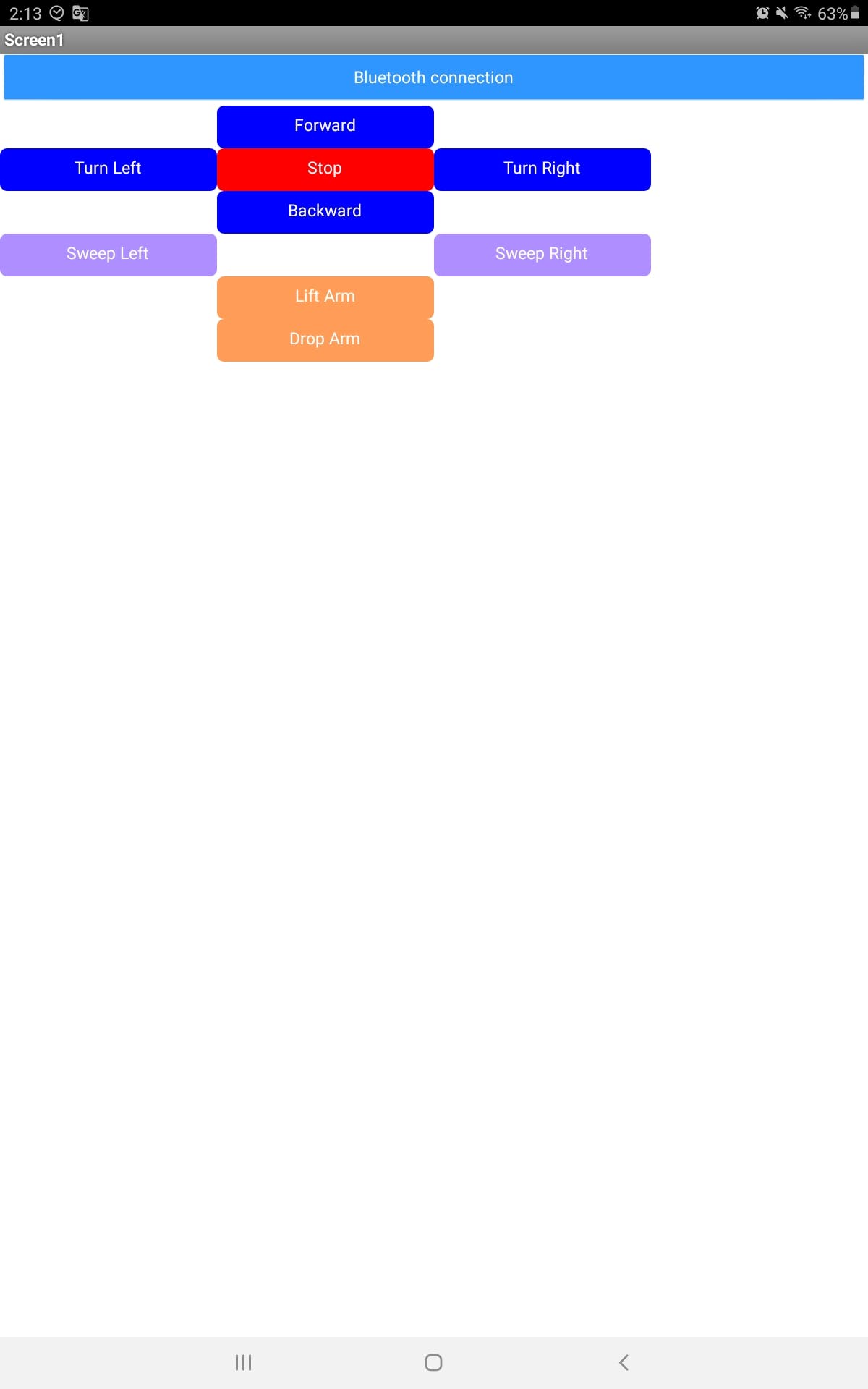
这只是一个有趣的项目,我认为我会尝试建立和提高我的爱好技能。这个项目相当简单。BCR 使用 L293D 来控制机器人底部的驱动电机以及 MiniMaestro 来控制伺服系统。MiniMaestro 通过带有 SerialSoftware 库的虚拟串行端口与 Arduino 板通信。我还使用 MIT App Inventor 创建了一个应用程序来用我的平板电脑控制 BCR。该应用程序通过 HC-05 向 Arduino 发送一个字节的数据,然后 Arduino 将使用该数据将其放入开关功能中以确定要做什么。组成手臂的伺服支架和 MG996R 伺服系统都是从亚马逊购买的。我使用的是 7.4V 锂聚合物电池,但由于某种原因,当电池充满电时,它却保持在 8.4V 左右。由于我之前没用过MG996R舵机,我努力用 7.4 LiPo 电池为它们供电,并且在此过程中损坏了比我需要的更多的伺服器。我的解决方案是购买 DC 到 DC 稳压器。有了这个调节器,我能够为伺服系统提供稳定的电压供应。这个机器人的基础设计是在 Inkscape 上设计的。
对于 MiniMaestro,以下端口连接到电路的这些部分:
接地 -> 接地
VIN -> 5V(Arduino 板)
RX -> 端口 11
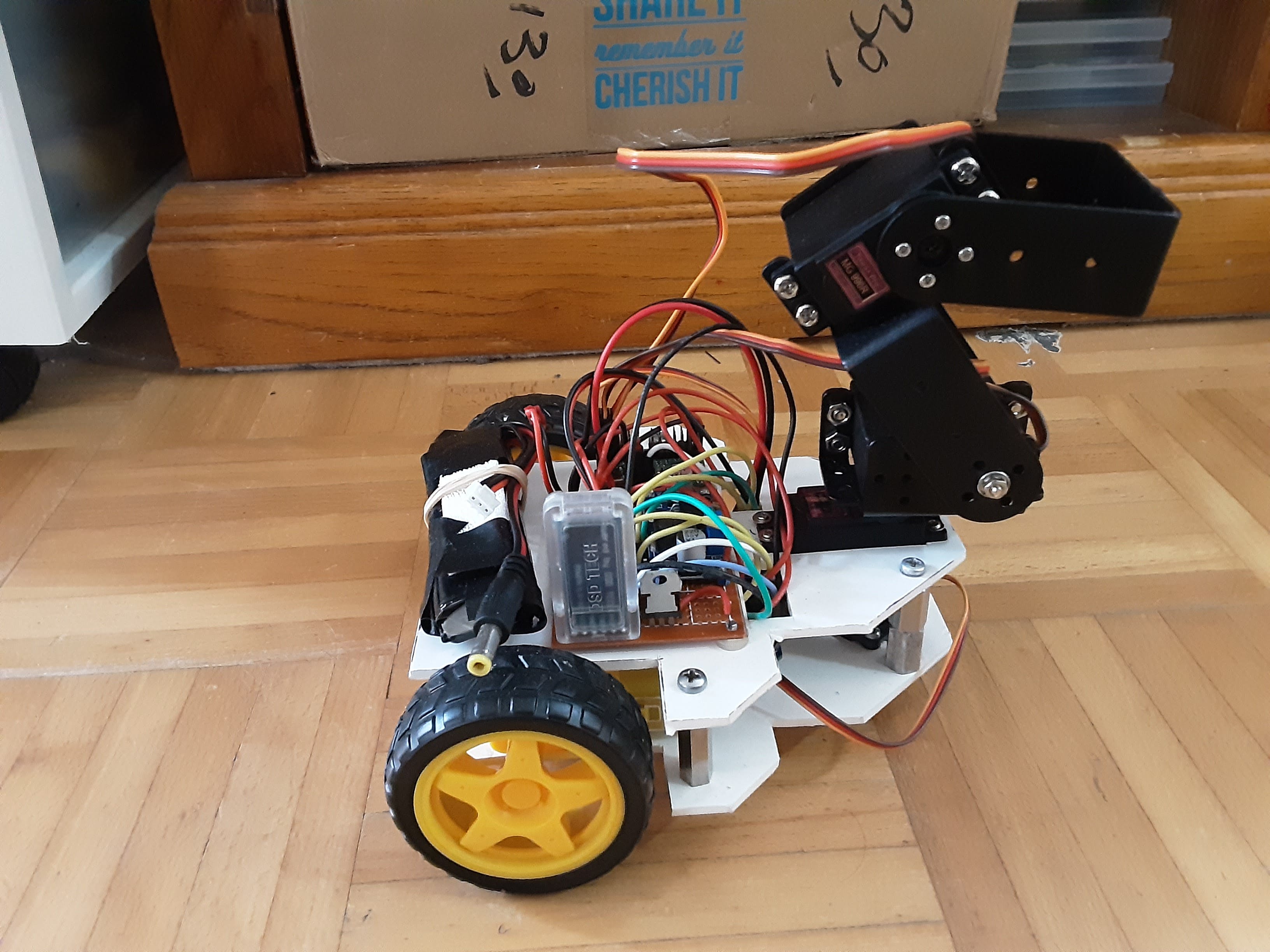
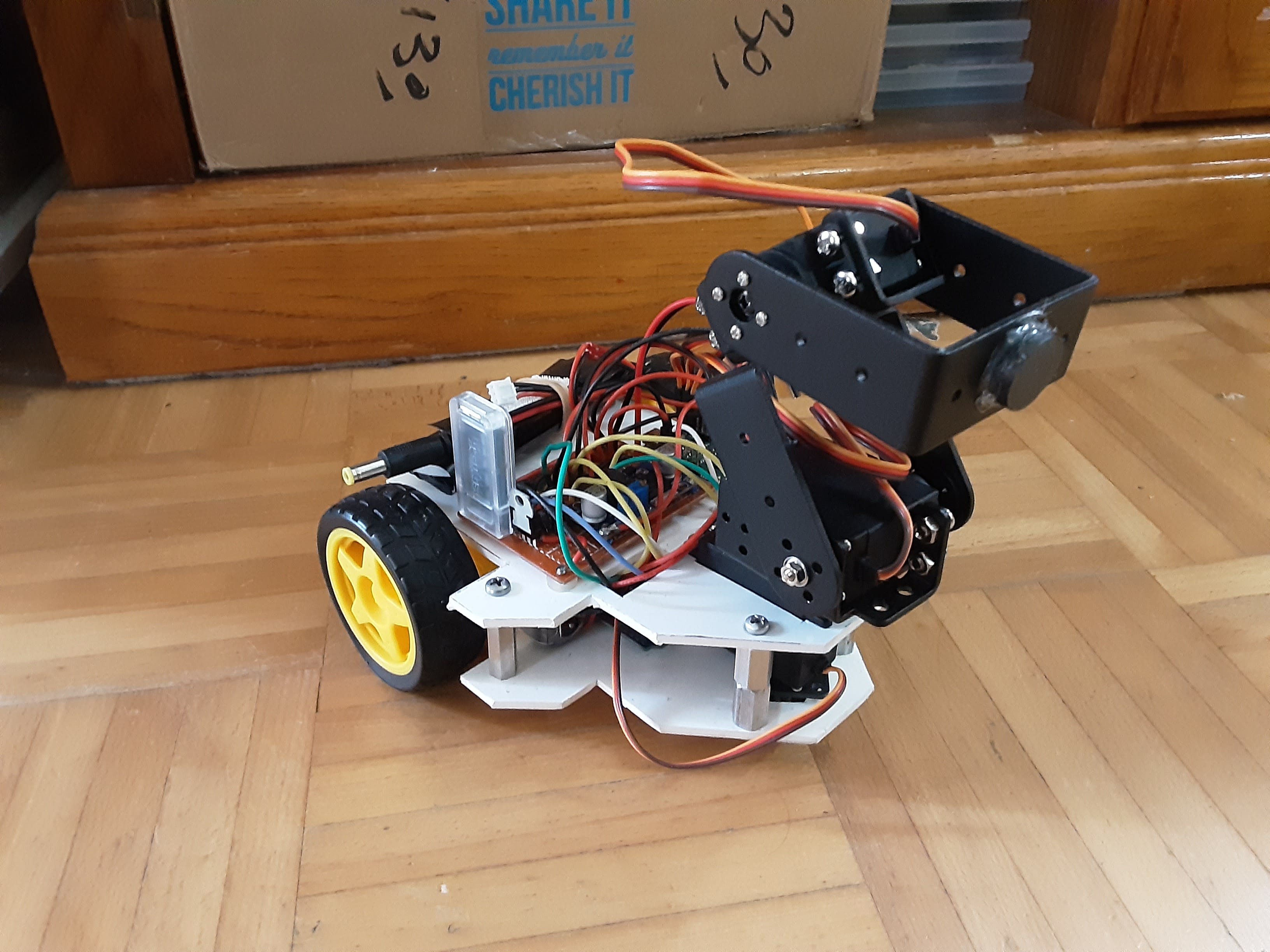
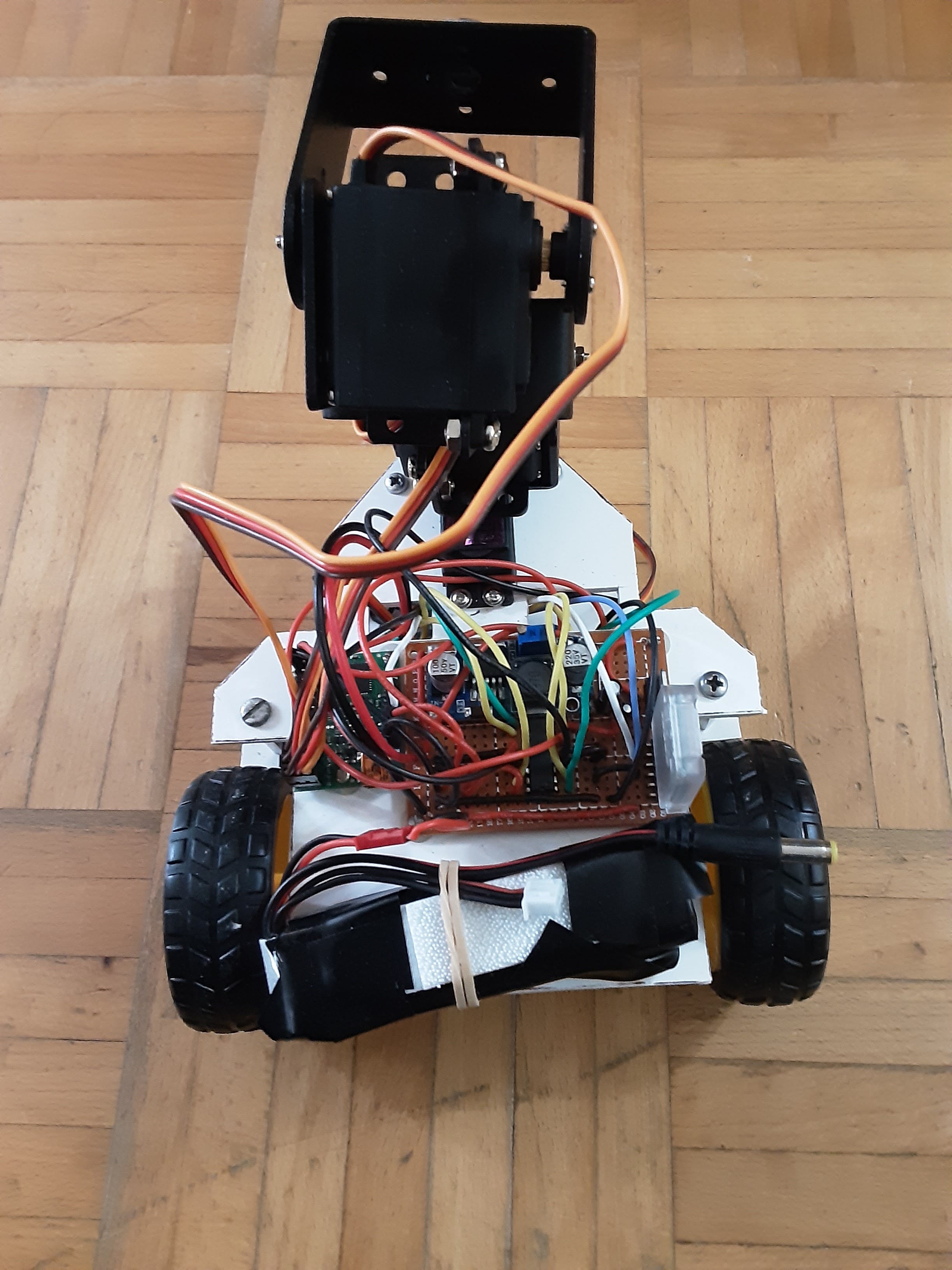
为了简单起见,我在手臂末端粘了一块磁铁,这样它就可以吸附其他磁铁。这是一个非常简单的项目,我觉得如果初学者想尝试新事物,他们可以使用它。希望你喜欢!

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






