
资料下载


×
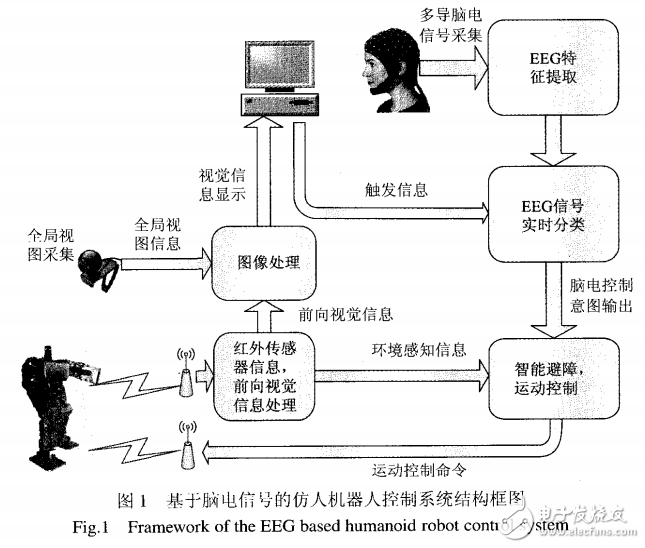
基于SSVEP方式的仿人机器人控制系统的设计
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-10-23
分享资料个
本文设计了稳态视觉诱发也位(SSVEP)空闲状态检测的特征提取方法,建立了基十SSVEP 的异步脑机接L.二级分类器结构,开发了基于TI CC2430 芯片的无线传感器网络模块,实现了机器人控制命令的远程传送,使该仿人机器人系统具有脑电控制、语弃交互、游戏手柄交互、机器视觉与避障等功能。通过SSVEP 空闲状态检测实验验证了脑机接山系统异步控制的有效性。
2系统总体设计(System overall design )
SSVEP 是人脑视觉皮层对处于视觉中心的闪烁刺激的一种生物反馈。研究证明,处于视觉中心的闪烁刺激能够对视觉皮层的神经元群在特定模式上的神经活动产生增强作用,从而对脑屯信号特定频率成分的幅度进行调控.SSVEP 的响应频率一般与视觉刺激频率相同,通常认为,稳态视觉诱发电位在视觉刺激频率处于4 Hz~ 6Hz 时产生。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




