
资料下载


可变阈值SIFT算法匹配无人机影像
分享资料个
无人机具有成本低、机动灵活、操作简单、易维护等特点,广泛应用于航空摄影测量中。但是无人机影像存在重叠度、旋转角度变化大、存在较大的畸变等问题,采集到的无人机影像必须通过图像处理才能应用到测绘生产中。如何快速有效地处理无人机影像较大畸变,对无人机摄影测量十分重要,而其中影像匹配是解决该问题的关键。影像匹配是通过一定的匹配算法在两幅或多幅影像之间识别同名点的过程。图像匹配作为影像处理中关键的部分,是实现后期影像数据分析的前提和基础。影像匹配分为于基于灰度的影像匹配、基于特征的影像匹配。基于灰度信息的影像匹配是根据两幅图像重叠区域的灰度级的相似性程度,来决定匹配点,有比值匹配法、块匹配法和网格配准法,实现比较简单,但其计算量大、复杂度高、对图像灰度变化敏感、算法精确度不高,一般不会单独使用基于灰度的影像匹配算法。
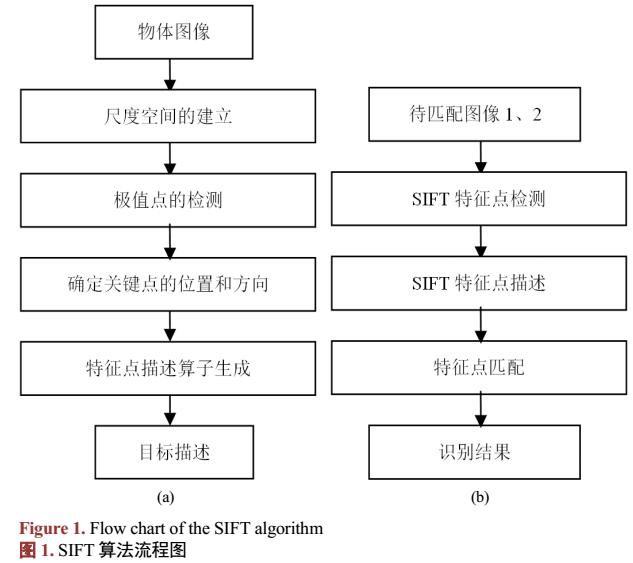
本文针对无人机影像,对其影像匹配进行研究,采用了可变特征点检测范围的SIFT影像特征匹配算法,并基于随机抽样一致性(RANSAC)算法,剔除误匹配点对。RANSAC算法可以在一组包含“外点”的数据集中,通过不哳迭代,将数据建立数学模型进行拟合验证,以便去除噪声点,获得稳健参数估计。本文对SIFT算法极值点的检测和阈值的选择进行了可变阂值优化试验研究,以特征提取、描述和特征匹配为核心,通过对原始匹配点进行预处理,以提高影像匹配速率,通过误匹配点对的检测以提高配准率。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



