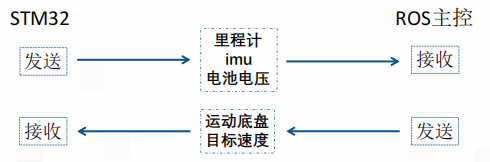
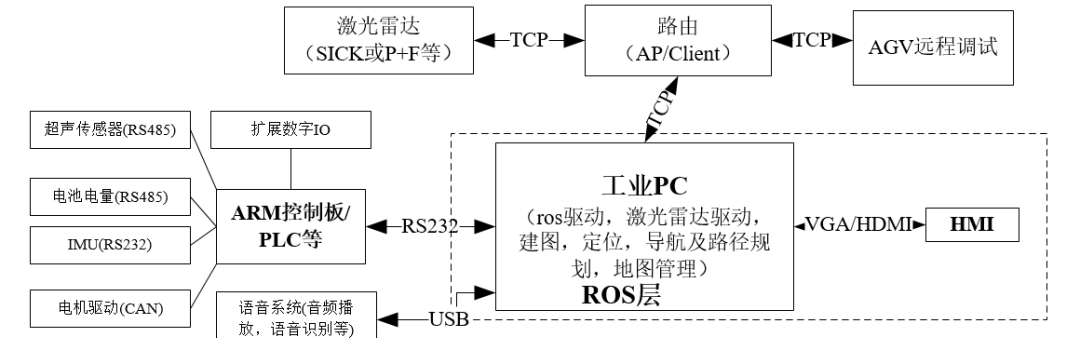
智能车ROS与STM32串口通信代码

ROS主控与STM32的硬件连接和软件连接
智能车控制器功能有哪些

ROS编写参数配置文件示例程序
ROS Motion Planning运动规划库如何安装相关依赖

如何创建新的ROS工作空间
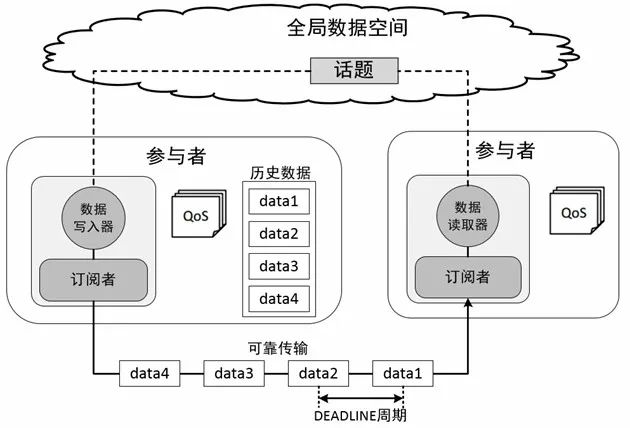
DDS为ROS的通信系统提供了哪些特性

DDS在ROS2中的应用

如何配置ROS驱动功能包
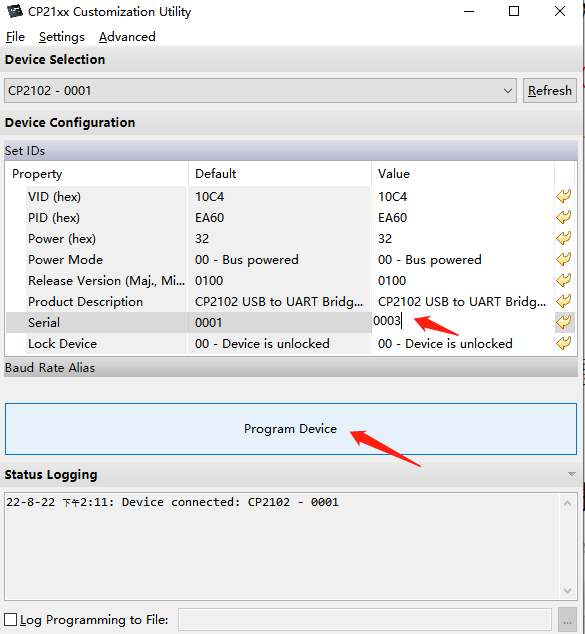
ROS如何配置固定串口设备
惯性传感器原理是什么 WHEELTEC N100模块介绍
机器人坐标系Launch文件解析
机器人坐标系管理TF跟随功能解析
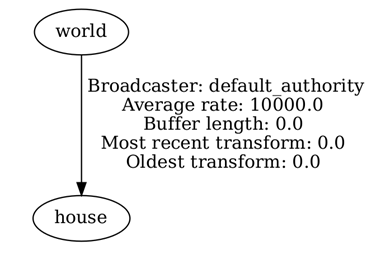
如何对机器人静态TF广播进行管理
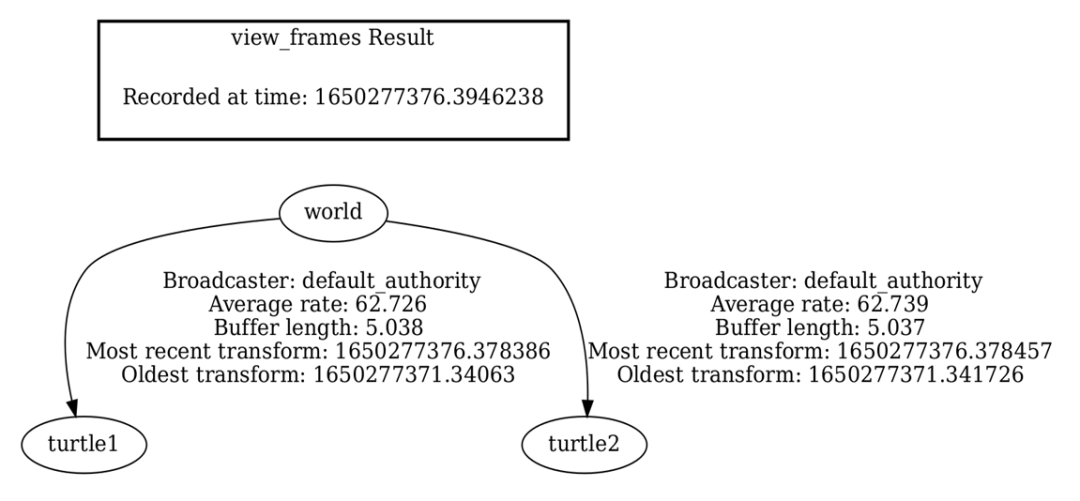
ROS中的TF该如何使用

机器人中都有哪些坐标系
ROS的运用开发详解
ROS的扩展有哪些方法

ROS核心框架介绍
ROS的简单开发及其理解

 下载APP
下载APP
 搜索内容
搜索内容
