
资料下载


永磁同步电机的资料和仿真模型与无速度传感器控制的论文免费下载
周佳新
分享资料个
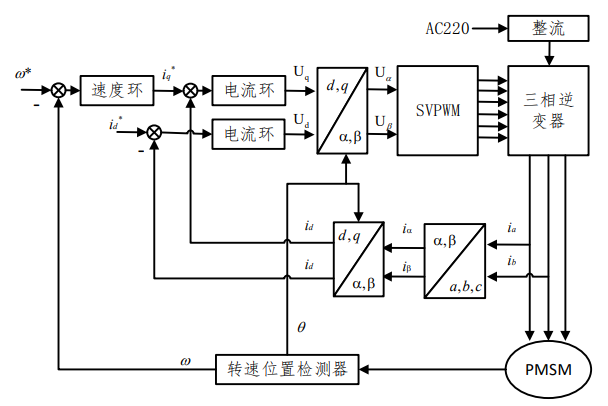
复杂的机械传感器加大了闭环调速系统的空间尺寸、成本,并且限制了使用条件、降低了系统的可靠性,无机械传感器调速系统优势越来越明显。本文分析了永磁同步电机的结构、数学模型及其调速方法,结合坐标变换理论、SVPWM 调制技术构建了永磁同步电机的矢量控制系统 Simulink 仿真模型,分析其调速性能。接着研究了基于反电动势直接计算法、模型参考自适应法、滑模观测器法等三种转速位置辨识方法,仿真结果表明采用无机械传感器的矢量控制系统有较优的调速性能。并提出了滑模观测器法结合模型参考自适应法的新型转速位置辨识技术,提高了转速位置的估算精度,有效的削弱了系统的抖振,优化了系统性能。并分析了永磁同步电机转子初始位置的估测方法以及无机械传感器系统的启动问题,选取了 I-F 开环启动方案。最后搭建了基于 DSP28335 的实物平台,开发基于 C#语言的上位机,对系统做了主要测试。
交流电机驱动系统搭乘电力电子技术日臻成熟的东风,在调速领域声名鹊起,逐渐成为业内的中流砥柱。诸如矢量控制、直接转矩控制等优秀的方法,使其优势更加突出。1983 年,稀土永磁体—钕铁硼成功研制,它磁特性优异,来源十分广泛,成本低,成为高性能永磁材料发展的新成果,有效的改善了永磁同步电机的性能。永磁同步电机功率因数极高,当系统处于稳态运行时,转子铜耗非常的小,甚至在多数情况下转子损耗可以忽略不计;并且功率密度大,方便使用;还具有转矩脉动小、运行稳定的特点。负载转矩突变时,通过适当调节电机功角,永磁同步电机可以马上使转速保持不变,并且永磁同步电机短时间最大输出转矩可以达到其额定值的两倍以上。在闭环调速系统里,要通过轴上安装的机械类装置,来获取电机的转子位置及转速。机械传感器[1、2]提供所需的信号的同时,也带来了一些问题:(1)增大了空间尺寸、体积,(2)增大了故障率;(3)使用范围减小;(4)成本昂贵。
可见,无机械传感器技术具有很大的市场价值,但该技术在工程实际应用中仍不成熟,还需要解决很多问题。本文正是在此背景下开展的相关研究,侧重于永磁同步电机上的应用,讨论了不同的转速位置辨识方案,并基于独立辨识的思路,提出了 SMO 与 MRAS 结合的辨识技术。
本文研究的对象是表贴式永磁同步电机(SPMSM),在其磁场定向控制的基础上,广泛分析相关转速位置辨识方法,通过对比分析,实现优势互补。并讨论了如何实现无机械传感器控制系统下的起动,对比了几种转子初始位置检测手段。本文大致从以下几个章节展开分析。
第一章:介绍了交流调速的背景及意义,明确了同步电机的优势、无机械传感器调速系统的优势,分析无机械传感器控制方法能够带来的益处。最后指出了国内外科研工作者在这个方面的成果、进展。
第二章:简略介绍了PMSM的结构特点,推导其理论公式,得到其数学模型,然后在等效变换的原则下引入坐标变换理论,得出了各个坐标系下的转换关系式,并就如何实现矢量控制展开分析。对比了常见的四种控制策略的优缺点,最终选用令 0 d i 的控制策略。
第三章:简略分析了SVPWM调制技术原理,在Simulink环境下开展仿真研究,分步对 SVPWM调制技术进行验证,在此基础上实现磁场定向控制。
第四章:研究分析了反电动势、MRAS、SMO等转速位置估测方法的基本原理,在 0 d i 的有机械传感器永磁同步电机矢量控制模型的基础上搭建相关的仿真模型,使用估测结果作为反馈信号投入控制系统,验证估测算法的正确性并测试了调速系统的性能指标。提出了转速位置独立辨识的思路,即SMO与MRAS结合的辨识方法,并进行了仿真验证工作,结果表明该方法对削弱SMO系统输出抖振、提高估测精度具有良好的效果。同时分析了无机械传感器系统中的转子初始位置辨识策略,分析了预定位、高频注入、开环启动等解决方案。
第五章:介绍了基于DSP的无机械传感器矢量控制系统的平台搭建,包括硬件设计、下位机程序设计以及基于C#语言的上位机程序设计,并对系统的设计进行了主要测试。
第六章:对课题工作作出总结,指出了设计中的优势与不足,提出了改进方案,指明了后续研究的重点内容与方向。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




