
资料下载


×
智能小车竞赛的技术报告详细说明
消耗积分:0 |
格式:rar |
大小:0.37 MB |
2019-09-27
分享资料个
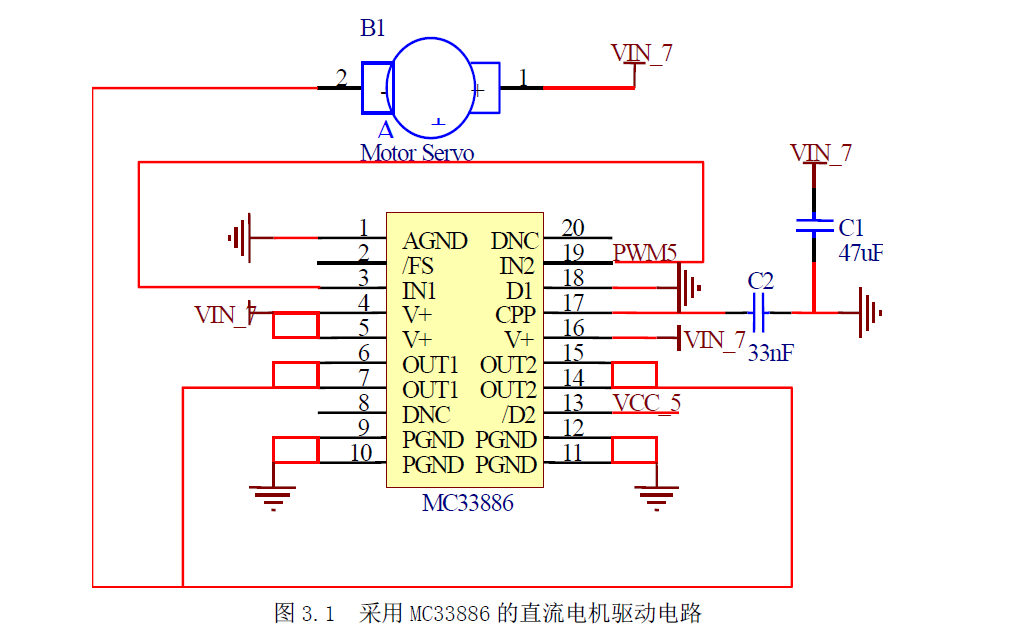
本次比赛车模要解决的问题就是赛道检测,我们队采用的检测方案靠面阵CCD 加8 个光电管实现。CCD 主要负责弯道检测,在入弯之前让小车有足够的时间做出减速、旋转舵机等动作,还可根据检测到的弯道情况给出不同的舵机信号。在车前再安装一排8 个光电管是考虑到CCD 的检测频率较慢,会影响小车的稳定性,需要用其他检测手段加以校正。比赛的另一个关键是速度,我们采用的PI 算法对车模的速度进行控制,在车子后轮转轴安装光电码盘对小车速度进行检测,将检测到信息送入单片机形成速度闭环,对偏差进行修正。其他更详细的内容会在正文中分别进行介绍。首先,会介绍一下我们对小车机械性能方面的调试,包括模型车机械部分安装及改造、传感器的设计安装,系统电路板的固定及连接等。第二部分,对电路设计进行说明,包括电原理图中各模块功能介绍及PCB 排版。第三部分,介绍检测和控制策略,包括传感器策略,控制算法介绍。第四部分,介绍参赛车模的各种参数,包括改造后的车模总体重量,长、宽、高尺寸等基本参数,赛道信息检测精度、频率,电路功耗,所有电容总容量等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




