
资料下载


智能寻迹小车控制算法研究与程序设计论文免费下载
分享资料个
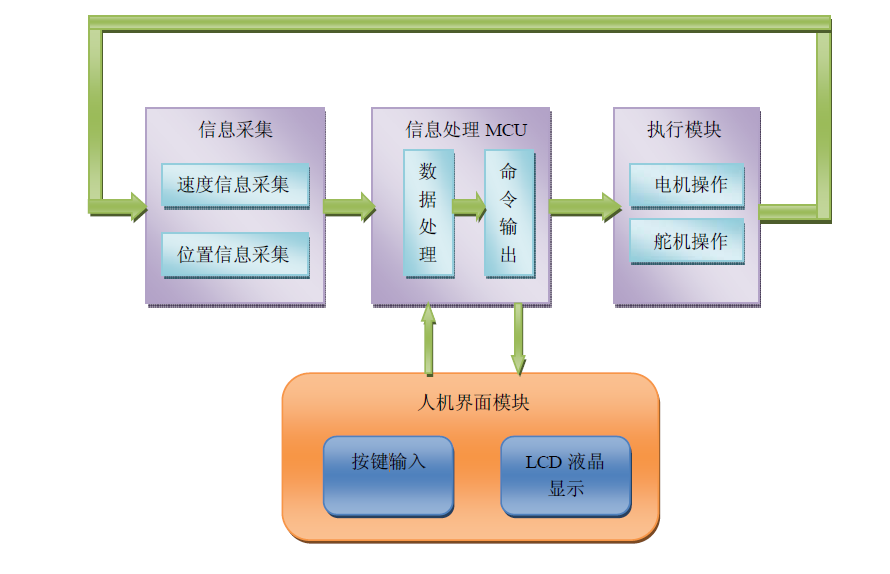
智能小车以飞思卡尔16位微控制 MC9S12DG128B为控制器,采用多传感器进行信息采集,运用反射式红外传感器设计路径检测模块和速度监测模块。同时,采用PWM技术,控制舵机的转向和电机转速。系统还扩展了LCD(Liquid Crystal Display:液晶显示屏)和键盘模块作为人机操作界面,以便于智能小车的相关参数调整。此外,PID寻迹算法结合ABS(Anti-skid Brake System.:防抱死系统)技术,使我们的小车能在曲折的赛道上畅通无阻。
技术报告以智能小车的设计为主线,包括小车的构架设计、软硬件设计,以及控制算法研究等,分为六章。其中,第一章为引言部分,第二章主要介绍了小车的总体设计,第三章对小车的硬件设计进行了详细的介绍,其中包括机械改造,电路设计两大部分,第四章描述了小车的软件设计和相关算法,第五章对使用到的单片机资源作了说明,第六章叙述了我们在设计过程中遇到的问题和解决方法。附录A的研究论文介绍了小车智能行驶的控制算法,附录 B 为程序源代码清单,红外传感器参数说明见附录C,附录D为小车配件清单。
在本次竞赛中,要求所设计的小车具有自动寻迹的功能,能在指定跑道上高速,稳定地运行。跑道为黑白两色。其背景色为白色,跑道中央有一条黑线作为小车行进的依据。很明显,我们要设计的小车是要能沿黑线的正常行驶,并在此基础上,尽量提高小车行驶速度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






