
资料下载


×
使用AT89C52单片机和反射式传感器设计实现智能巡线机器人的资料说明
消耗积分:0 |
格式:rar |
大小:0.19 MB |
2019-10-17
分享资料个
本文介绍了利用红外反射式传感器实现小车自动识别路线的设计与实现。系统控制核心采用AT89C52单片机。利用模糊算法以及PWM控制方式来实现直流电机的驱动。
自智能机器诞生至今,其发展已经经历了半个多世纪,已经形成了一个巨大的智能机器产业.智能机器是高新科技的综合产物,它涉及电子,机械,传感器,计算机,自动化,信息处理等多门学科。在无人驾驶机动车、无人工厂、仓库、服务机器人等领域智能巡线机器人有着广泛的应用前景。本文介绍的巡线机器人的主要工作原理是利用光电检测装置检测路面上的轨迹,并将轨迹信息送到单片机,单片机采用模糊推理求出转向的角度和行走速度,然后去控制行走部分,最终使机器人可以按照路面上的轨迹行走。
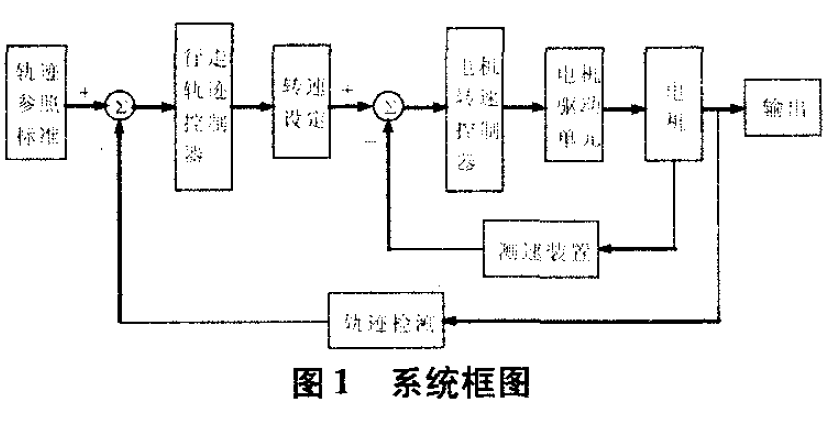
系统采用AT89C52为核心元件,驱动部分由两个6V直流电机构成。当机器人在铺有黑色轨迹的白色路面上行走时,由于白色地面与黑色轨迹对光反射存在强度上的差异。所以,我们利用路面检测鼯分中的红外光电发射接收二极管进行检测,判断车轮所在位置,并将检测到的信号进行A/D转换后反馈给单片机,从而为单片机控制机器人的运动(如转弯、直行等)提供了信息。图1为系统框图。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





