
资料下载


×
如何进行红外反射式传感器的自寻迹小车的设计
消耗积分:0 |
格式:rar |
大小:0.32 MB |
2019-07-04
分享资料个
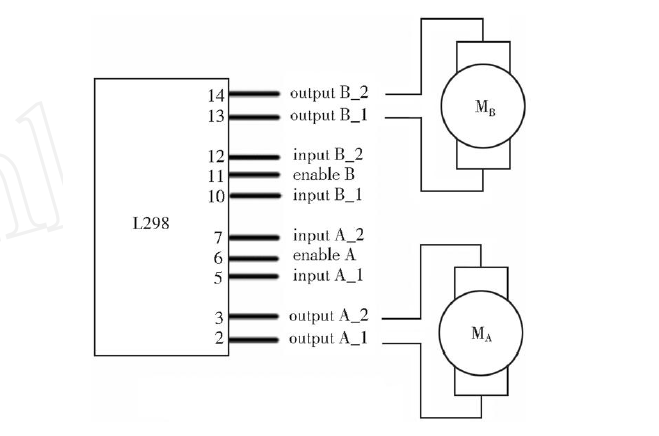
介绍了采用红外反射式传感器的自寻迹小车的设计与实现。采用与白色地面色差很大的黑色路线引导小车按照既定路线前进, 并能在意外偏离引导线的情况下自动回位。以凌阳SPCE061A单片机作为控制核心, PWM方式实现电机调速。该技术可广泛应用于无人生产线, 自动巡逻等领域。
机器人自诞生以来, 在社会生活各领域的应用越来越广泛。随着研究的深入, 机器视觉已成为机器人领域研究的一大热点。利用CCD传感器进行自动导航的机器人已得到初步应用。但CCD传感器价格较高, 体积较大, 数据处理复杂, 因此在按路面画好的既定路线行走的自寻迹机器人设计中,红外反射式传感器以其体积小, 价格低, 数据处理方便而显得更有优势。本装置即采用该传感器, 成功实现了小车的自动行走和意外处理。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





