
资料下载


×
使用Kalman滤波模型提高自动导航定位精度的详细说明
消耗积分:0 |
格式:rar |
大小:2.59 MB |
2020-08-24
分享资料个
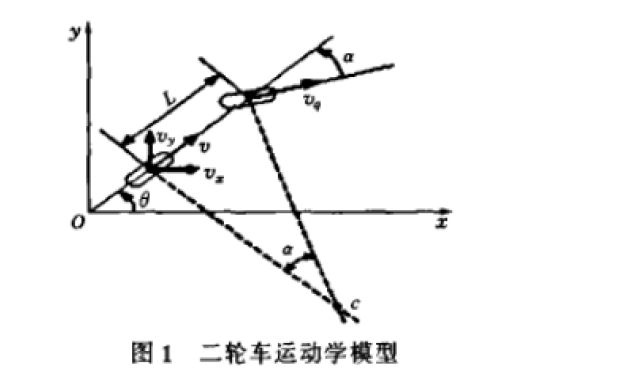
因RTD-GPS定位精度不能满足农田导航作业的需要,研究了一 种提高农用车辆自动导航定位精度的方法。建立天线补偿模型,对GPS天线晃动引起的误差进行了补偿;建立基于Kalman滤波模型,融合多传感器信息;使 用自主开发的基于VRS的GPS接收机,作为RTD-GPS.将RTD-GPS,电子罗盘以及速度传感器获得信息进行Kalman滤波,其结果和高精度 GPS数据进行了比较。实验证明,直线跟踪中,平均偏差由1.6019m减小到0.597m;曲线跟踪中,平均偏差由1.2085m减小到 0.4861m.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




