
资料下载


模型火箭发动机试验台开源分享
好名字
分享资料个
描述
你有没有想过火箭发动机的推力是什么样的?好吧,你可以自己找出来!使用称重传感器、HX711 称重传感器放大器和 Arduino Uno,您可以为自己制作一个测试台。首先,我们将介绍它是如何工作的,然后我们将向您展示如何制作自己的。所以让我们开始吧!
典型模型火箭发动机的推力如下所示:
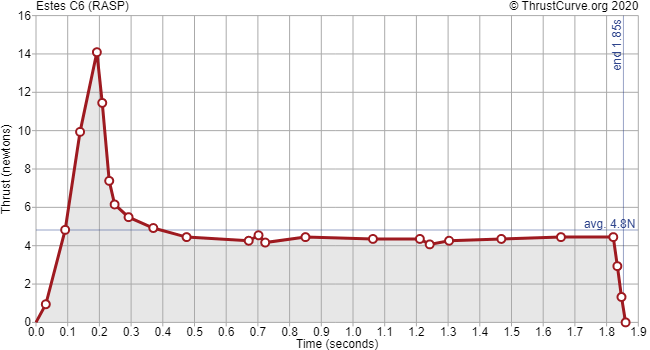
如您所见,在大约 0.1 秒内,推力出现了一个巨大的峰值,然后趋于平稳。我们需要能够准确地衡量这一点。为此,我们将使用四线称重传感器。
问题是 Arduino 无法读取称重传感器输出的电信号。这就是称重传感器放大器的用武之地。称重传感器放大器将放大来自称重传感器的信号,因此 Arduino 数字引脚将能够处理数据。对于这个项目,我们将不得不使用 Sparkfun HX711 放大器,因为它可以让您将频率从 10hz 更改为 80hz,而 10hz 不足以用于火箭测试台。
那么让我们开始使用这些材料:
此外,如果您想观看一些镜头和数据分析,请查看这些视
材料:
带有星星的那些意味着你需要得到那个特定的。除此之外,其他的都值得推荐。全部来自亚马逊:
电子产品
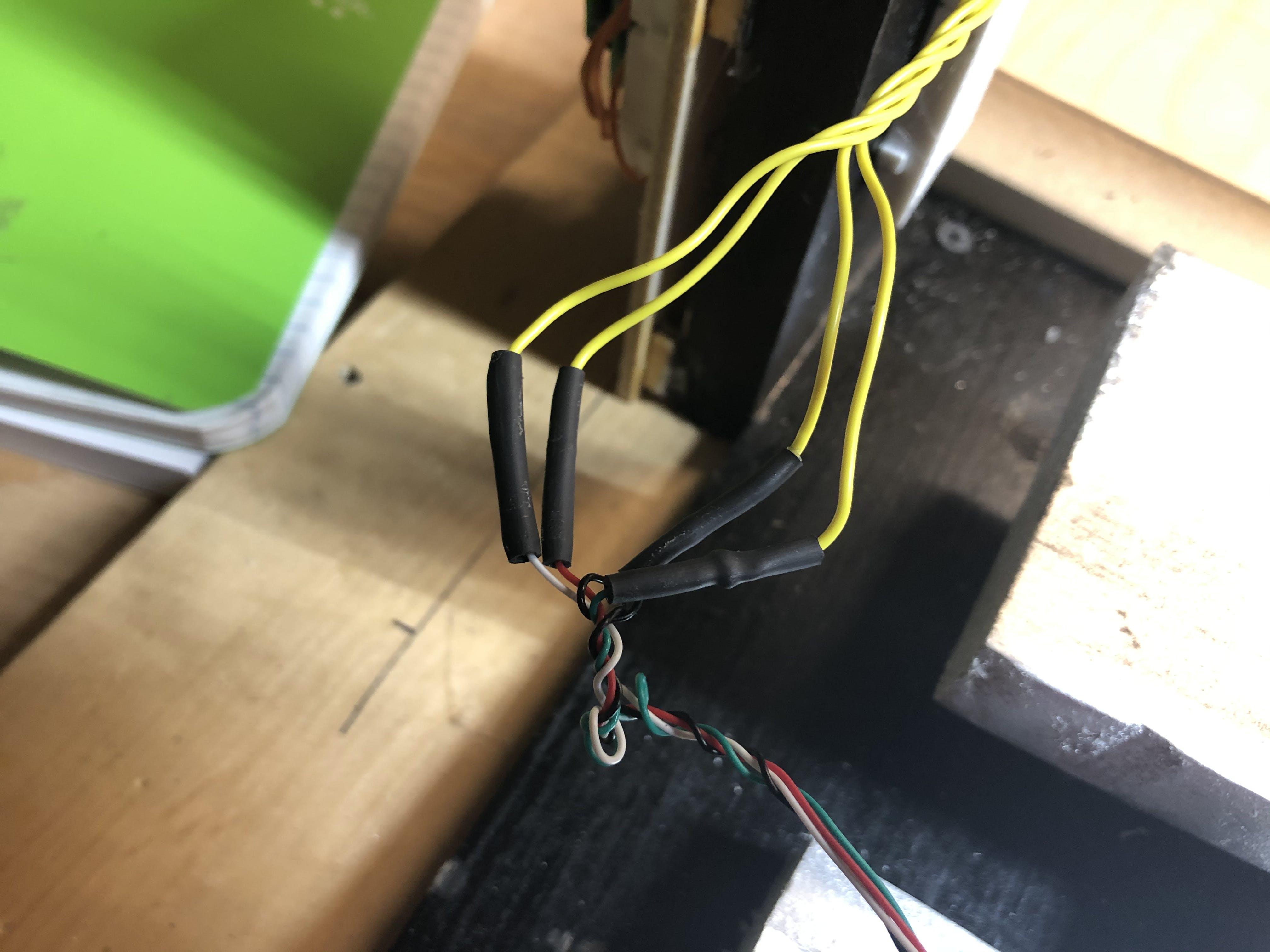
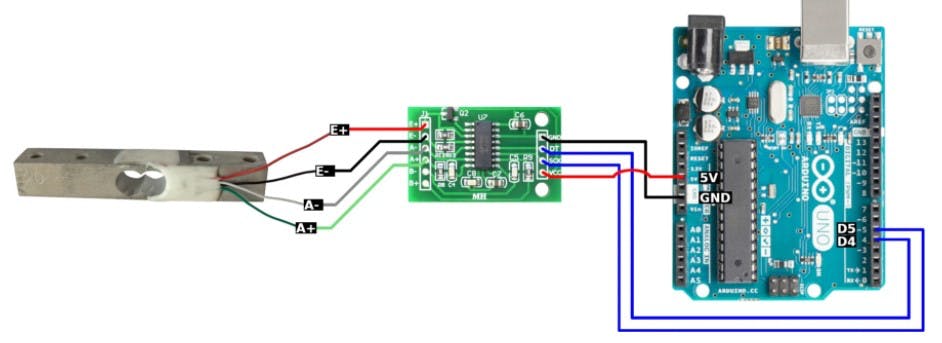
首先,您需要将称重传感器的电线焊接到 Arduino 面包板跳线。您可能需要剥去称重传感器的电线,以便轻松地将电线焊接在一起。
现在只需添加热缩管也可以保护电线。
安装称重传感器并制作秤盘:
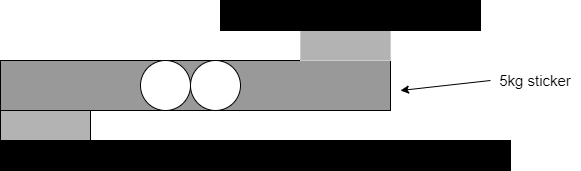
现在电线已焊接并热缩,我们可以将称重传感器连接到钻机上。称重传感器上应该有一个标签,显示最大重量和一个箭头。我们希望称重传感器的位置使箭头指向下方,并且称重板位于其正上方,如下所示。↓ 您可以使用木材或 3D 打印部件来连接称重传感器。
将称重传感器连接到 HX711,然后连接到 Arduino Uno:
首先,您需要准备称重传感器。Sparkfun HX711 放大器的默认设置为 10hz。您需要将其更改为 80 赫兹,以便每秒获得更多读数。为此,请使用 X-Acto 刀切割电路板背面的 RATE 线。此外,将公头引脚焊接到 HX711 板上。
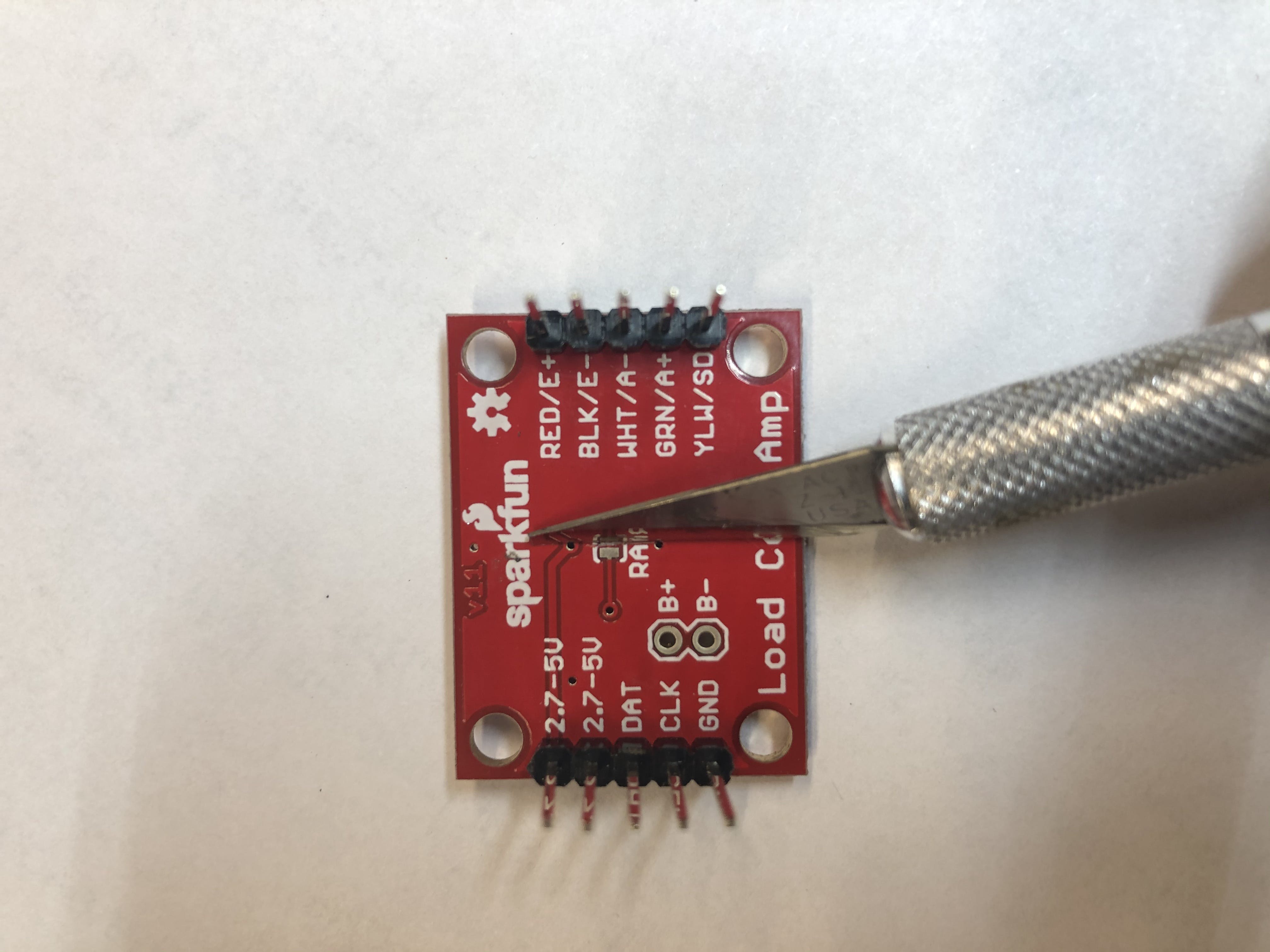
在板的左侧,有引脚标签:RED、BLK、WHT、GRN 和 YLW。最后一个引脚 YLW 将不会被使用。使用面包板,将红色、黑色、白色和绿色引脚连接到 HX711 上的 RED、BLK、WHT 和 GRN 引脚。现在,将 VCC 引脚连接到 Arduino 上的 5V 引脚,将 DAT 引脚连接到 Arduino 上的数字引脚 8,将 CLK 引脚连接到数字引脚 9,并将 GND 引脚连接到地。现在你已经完成了电子设备。
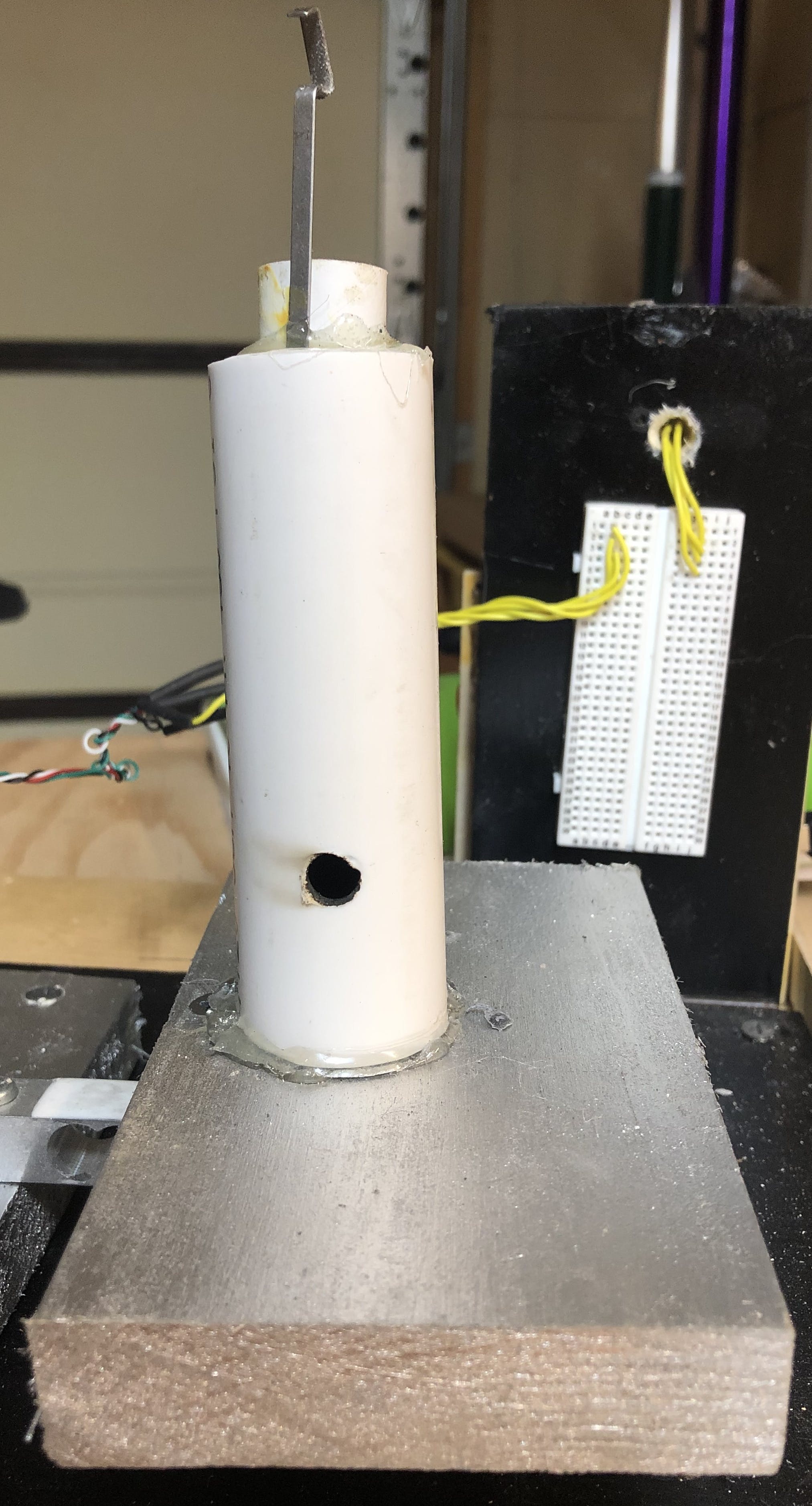
现在我们需要构建电机支架。
从 Estes 网站或其他火箭公司,购买发动机支架的零件并建造它。然后拿到发动机支架并将其连接到带有环氧树脂的 PVC 管中。确保一切都非常坚固,因为您可能会对电机支架进行大量测试。之后,在 PVC 底部钻一个大孔,以便可以安全地存放弹射装药。现在,将 PVC 管粘在秤上。如果 PVC 有点歪,不用担心数据是准确的。
现在所有的建筑和电子设备都完成了。我们现在需要上传软件。
上传代码
转到Arduino IDE 下载。按照下载说明安装应用程序。你也可以使用我个人的 IDE PlatformIO。
完成下载后,转到此GitHub 存储库。
下载 Zip 文件并解压缩。打开文件夹并转到“Test Stand Calibration”,在文件夹内,应该有一个名为 Calibration21 的.ino 文件。使用 Arduino 应用程序打开文件,它会要求您创建一个文件夹。单击是并打开代码。
打开代码后,将 Arduino 连接到您的设备。现在转到左上角的“工具”并选择您的板作为“Arduino Uno”并选择适合的串行监视器。
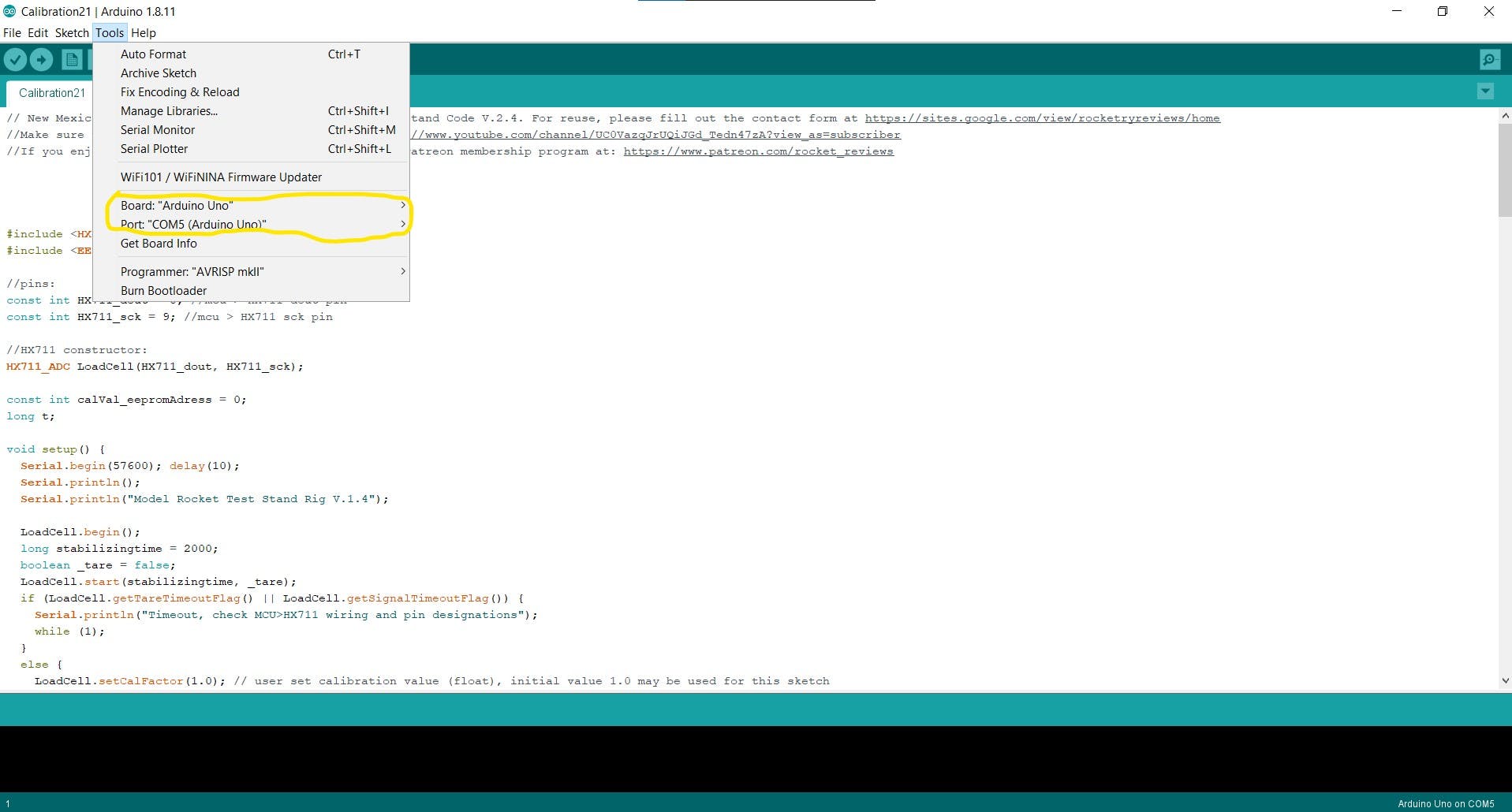
现在单击“文件”选项卡下方的上传或带有箭头的按钮。如果上传有问题,请尝试更改串口。
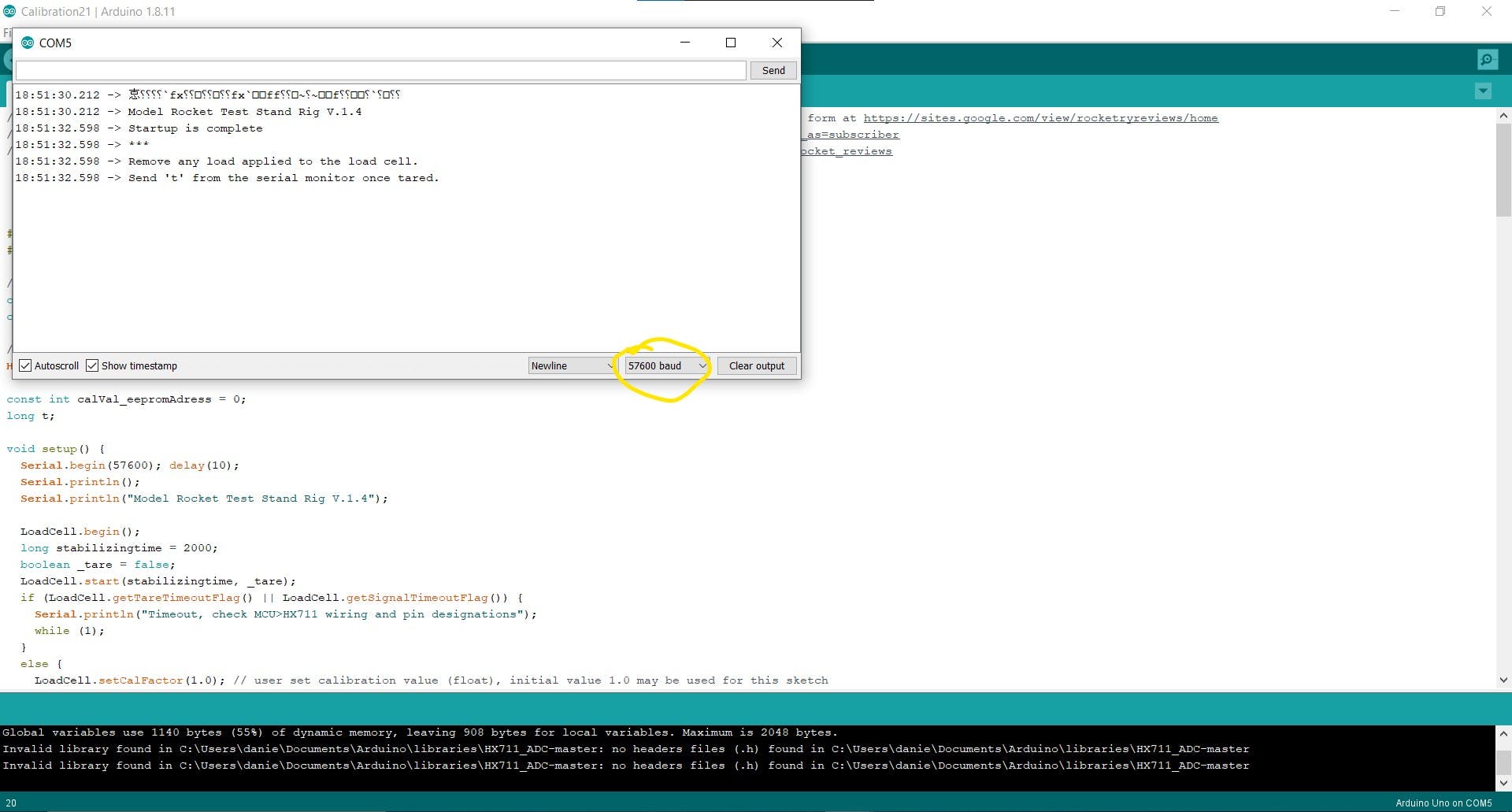
现在代码已上传到 Arduino,按 CTRL+SHIFT+M 或 CMMD+SHIFT+M 打开串行监视器并将波特率更改为 57600。
现在我们可以开始校准和测试电子设备了。
校准
现在串行监视器已启动,它应该启动并要求您去皮重。将测试台放在平坦的表面上,确保称重传感器上没有负载。完成后,通过串行监视器发送“t”。
之后,它会要求您提供校准砝码。使用单独的秤或已知重量(例如 iPhone),将该重量放在秤上并输入以克为单位的物体重量。然后串行监视器将为您提供校准值。将该值复制到剪贴板。
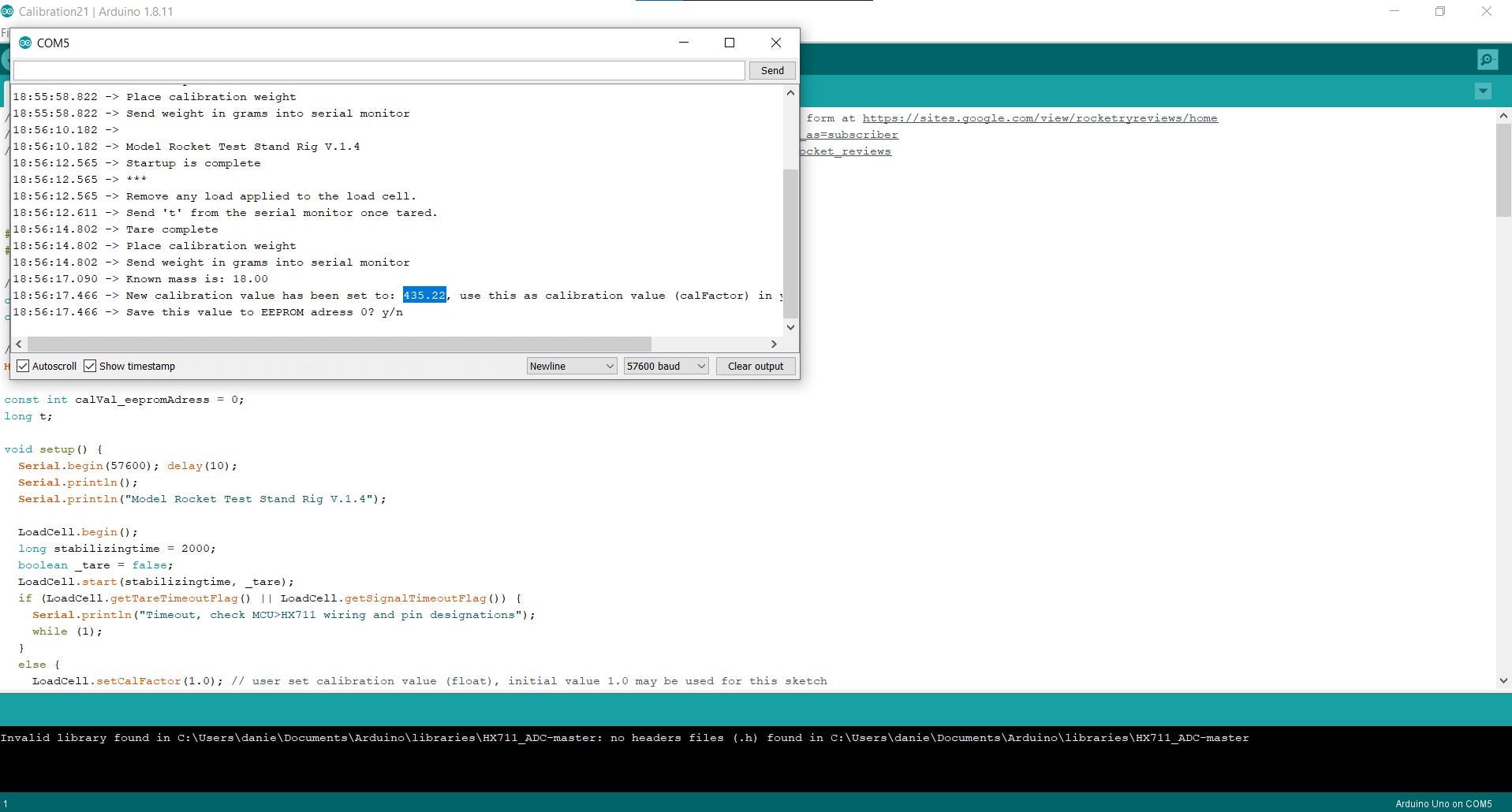
现在通过串行监视器发送“y”。监视器应该开始输出值。如果您取下校准砝码,串行监视器应立即读取 0.0,如果您重新戴上或增加砝码,串行监视器应增加该值。
- 如果串行监视器读取 n/a,则检查引脚名称和接线。
- 如果串行监视器不是每秒读取 90 个点,请切断跳线。
现在您已经复制了校准值,转到从 GitHub 下载的同一个文件夹,然后从该文件夹中打开 Measure.ino,然后使用 Arduino App 打开它。
现在将校准值粘贴到变量槽中,如下所示。
现在您已经复制了校准值,转到从 GitHub 下载的同一个文件夹,然后从该文件夹中打开 Measure.ino 并使用 Arduino App 打开它。
现在将校准值粘贴到变量槽中,如下所示。
现在您已经更改了校准值,再次将代码上传到 Arduino,然后按 CTRL+SHIFT+M 或 CMMD+SHIFT+M 打开串行监视器。显示屏应等待几秒钟并开始输出数据。如果关闭,请确保您的校准砝码。
如果一切正常,您的测试台已准备就绪!
测试——在测试之前要非常小心并阅读所有程序,并且只能使用经过认证的电机,例如 Estes 模型火箭发动机。
在测试之前,请确保电机安装非常牢固,并且安全程序已到位。
设置:
将测试台架安装在室外的空旷区域,经批准可用于火箭测试。确保附近没有易燃物品。现在使用电缆将您的设备连接到 Arduino 并上传 Calibration21 代码。确保您的设备位于安全可靠的区域。你可能需要用一些东西来保护它。现在校准代码已上传,插入电机和点火系统。确保安全钥匙在外面!
现在电机已就位,打开串行监视器(CTRL+SHIFT+M,或 CMMD+SHIFT+M)并发送“t”来为秤去皮。皮重完成后,将校准砝码放在上面(越重越好)并将校准砝码的重量(以克为单位)输入串行监视器。
串行监视器应该给你一个校准值。复制该值(像以前一样)并在串行监视器中输入“y”以确保您的测试台正常工作。在串行监视器中输入“y”后,串行监视器应准确显示称重传感器上的力值。
确保称重传感器正常工作后,打开通过 Arduino 应用程序从 GitHub 下载的“Measuring.ino”代码。将校准值粘贴到代码中(像以前一样)并上传代码。现在代码已上传,打开串行监视器(CTRL+SHIFT+M 或 CMMD+SHIFT+M)。确保串行监视器显示时间戳。现在串行监视器将开始输出称重传感器上的重量。不要在称重传感器上放置任何重量。
清除串行监视器的输出,尽快返回并启动电机。电机完成燃烧后,跑回支架并按下 Arduino 板上的重置按钮。
我们在启动前清除输出的原因是为了减少值(因为每秒有 80 个值需要排序),而我们显示时间戳的原因是为了以后可以轻松地绘制数据。
现在将串行监视器中的所有数据复制到剪贴板,并将其粘贴到 Word 文档或注释中。保存文档,以便稍后查看数据。
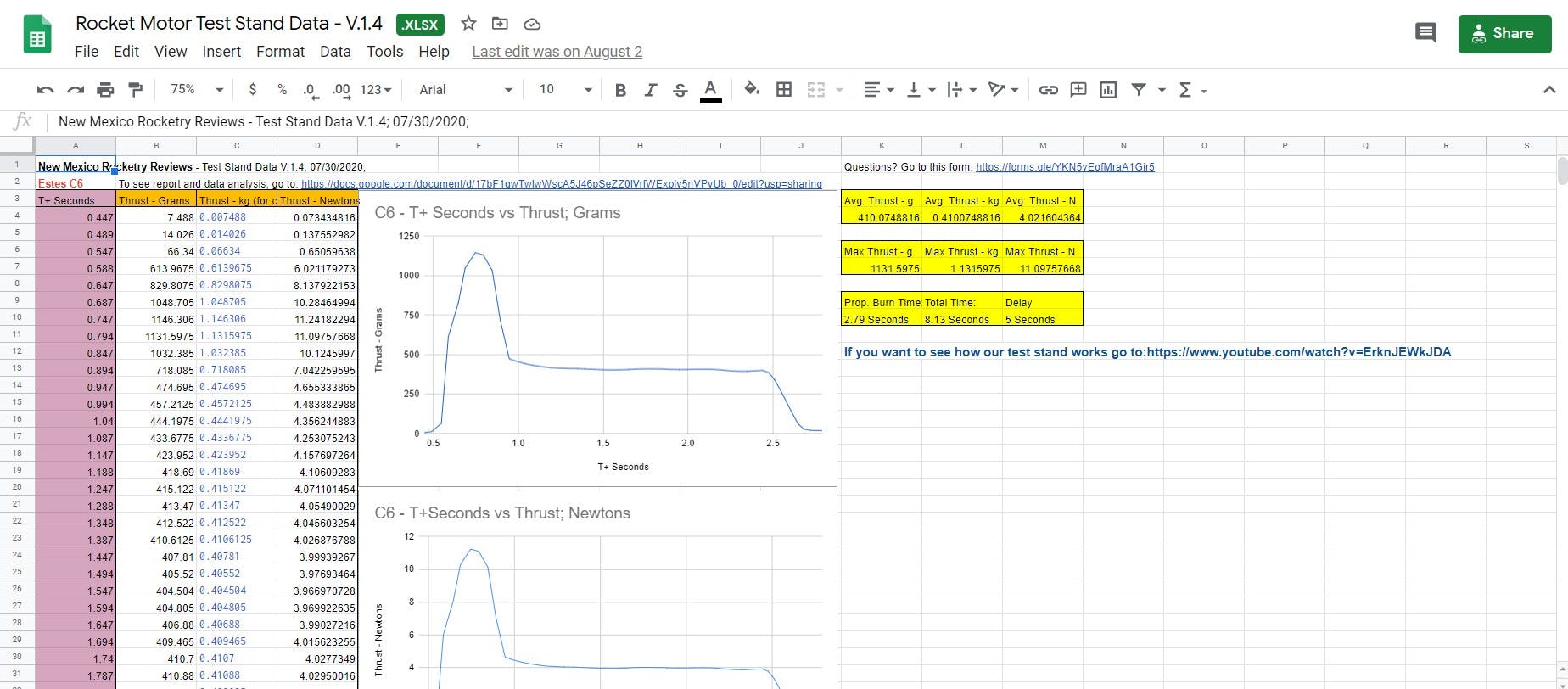
数据分析:
现在您已经保存了数据,请打开它。将所有时间戳复制到 Excel 文档中。您可能需要重新调整,因为串行监视器的时间戳显示实际世界时间 (HH:MM:SS)。现在将值输入到 Excel 文档中,完成后(应该需要一段时间),制作一个图表。它应该看起来接近您可以在线查找的推力曲线。(我们目前正在开发一个新代码,以便有更好的时间戳)
要将克转换为牛顿,请将克转换为千克,然后将千克乘以 9.807。
你应该有一个很棒的图表!
****
我希望你们喜欢这个指南!如果您有任何问题,您可以填写此表格:
另外,如果你们想支持我们,请查看我们的Patreon。如果没有您的支持,我们无法制作这样的指南或做我们所做的事情。每月只需 1 美元,您就可以解锁独家福利,例如屏幕积分、一对一帮助会议和每周发帖。我们真的需要你的支持。
另请确保订阅我们的YouTube以获取更多视频和指南,例如:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






