
资料下载


使用嵌入式ML对无人机进行预测性维护
h1654155273.0656
分享资料个
描述
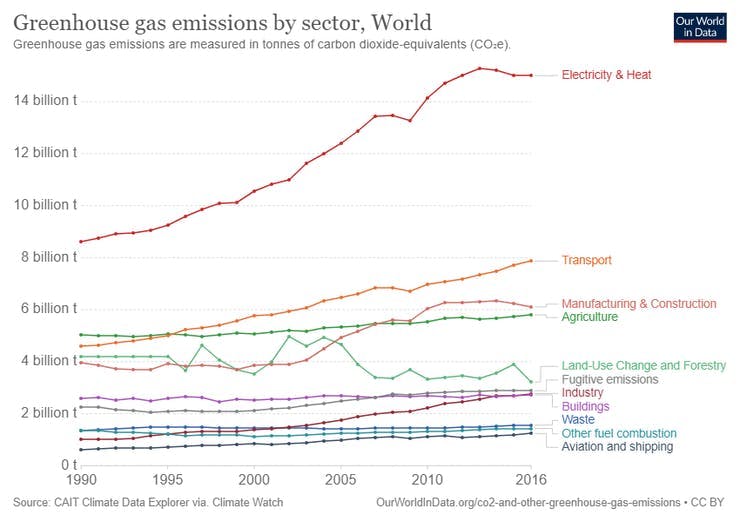
人类是自私的,消耗地球上所有的资源并不断地破坏它,导致气候变化等负面后果,导致全球变暖,蜜蜂和鸟类等物种的数量显着下降。
目前,物流从生产者到消费者的工作方式,占用了大量的运输。其中大部分是在平均效率为 20% 的内燃机上运行的车辆的帮助下完成的。与使用可再生资源的任何其他交通工具相比,这要少得多。这是二氧化碳排放的主要原因。这种二氧化碳排放导致全球变暖和气候变化。为什么我们不转向太阳能、风能、水电等可再生能源或核能等清洁能源?在使用汽油/柴油作为能源很容易的情况下,它们需要大量投资和前期成本。
电动汽车的主要问题是里程焦虑。人们担心如果充电结束或电池爆裂怎么办等。如果我们开发一种快速充电电池的技术并战略性地部署充电网络,那么未来使用电动汽车将很容易,至少在发展中国家。
来到我们的解决方案:货物的最后一英里交付对于任何组织都非常重要,因为它是与客户互动的最后一部分。如果交货无忧,客户将再次订购,希望得到良好的服务。但大多数时候情况并非如此,快递员弄乱了位置,然后我们应该与他沟通当前位置,否则包裹将被重新路由到另一个快递办公室,而客户在包裹办公室后面跑到办公室。所有这些都涉及不必要的车辆移动,导致二氧化碳和一氧化碳气体的排放。
使用自动电动送货车是最好的选择,像nuro这样的公司已经在研究它,这是一件非常好的事情。亚马逊等巨头正在开发基于无人机的送货服务,这将帮助我们显着减少排放。多旋翼飞机或俗称的无人机或四轴飞行器可以成为最后一英里货物交付的潜在替代品。由于路线杂乱无章,多个送货代理到达同一地点,送货车辆管理不善,货物的最后一公里运输本身需要大量能源。无人机交付可以成为相同的潜在替代品。
但是自动送货车和无人机都需要经常充电,而且它们的电池可能不会持续很长时间。特别是在四轴飞行器和多旋翼的情况下,每个电机的转速大约在 5000 到 10000 之间,具体取决于电机的 KV。每个电机的功耗在 100 到 300W 之间变化。因此电池只能运行 30 分钟到 1 小时。但在这段时间内,根据有效载荷和电池容量,无人机可以飞行 50 到 60 公里。但是,由于可伸缩的空中距离而不是道路距离,无人机可以更快地到达该地点。
但您可能会想,为什么不能添加更大的电池?但是更大的电池反过来会增加重量,从而减少飞行时间。因此,最佳有效载荷以及高效电池是唯一的解决方案。
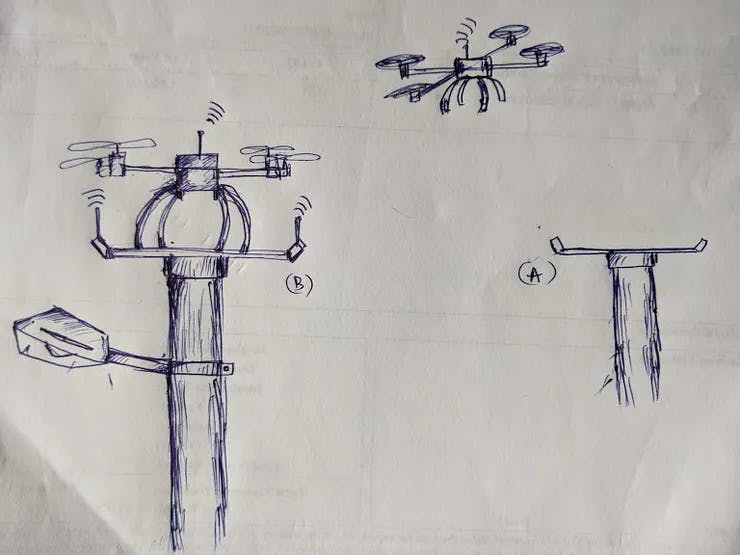
为了解决这个问题,我们建议无人机和自动送货车辆使用自动充电站,它们可以自行充电并从那里起飞。在无人机的情况下是鸟巢,在 UGV 或无人驾驶地面车辆的情况下是车库。但是需要仔细观察和维护无人机和 UGV,以充分利用它们
在无人机中,由于其部件以如此高的 RPM 移动,如果只有一个稍微松动的螺钉,就会因为高速电机的振动放大而造成灾难。快速基于羽毛的解决方案将用于检测这些微小缺陷,并在无人机从一个充电器跳到另一个充电器时定期提醒它们。
这种主动预测性维护也可用于 UGV,以检测其他方式无法检测到的异常情况。我知道上面的解释很长,但很需要说明我的观点。
让我们开始吧
第 1 步:获取所需的东西
获取所有需要的东西,例如快速羽毛、树莓派 4、BLDC 电机、木板、烙铁等
第 2 步:快速羽毛入门
这是一个精彩的博客是由Arduino"have11"Guy 写的关于这个主题的请参考那个并准备好基本的东西
第 3 步:训练数据:

我计划在无人驾驶无人机充电器的情况下将设备连接到无人机来和着陆的充电板上,并且在 UGV 的情况下充电时,该设备将保留在 UGV 本身上。这些充电站最好的一点是它们依靠太阳能运行,通过它我们将实现零碳足迹的目标,从而阻止最后一英里运输车辆的排放。此外,由于这些安装在路灯顶部,因此不会占用任何空间。
设备将运行诊断程序并检查缺陷,例如
1. 螺旋桨损坏
2. 螺丝松动
3. 不平衡螺旋桨
4. 损坏的框架
5、断线

损坏的螺旋桨损坏是危险的,因为任何以 10000 RPM 运行的偏心质量都可能是致命的武器。当无人机在空中飞行时,它可能会掉落并损坏人员,甚至可能由于高速剃须刀锋利的螺旋桨叶片而造成生命损失。
它会将它们标记为异常,并将其上传到仪表板中。
充电状态也可以共享到云端,标记充电器垫忙碌。
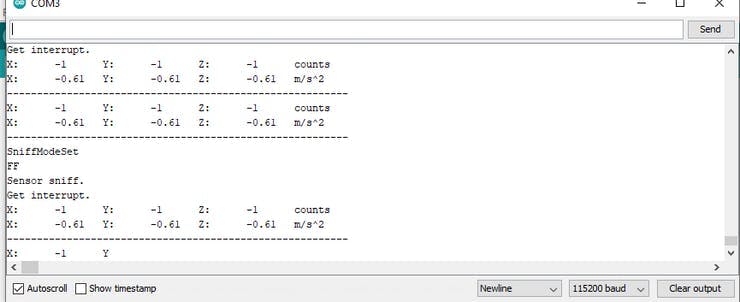
我尝试通过 IMU 传感器(即 MC3635)收集数据,但不幸的是,我的 IMU 提供恒定输出并且它的值没有变化,就像这样,我设法通过将 I2C0 输出连接到 Arduino Mega 板和通过访问传感器的 I2C 地址(0x44h)将数据读取到串行端口
Sensor sniff.
Get interrupt.
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
---------------------------------------------------------
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
Sensor sniff.
Get interrupt.
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
---------------------------------------------------------
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
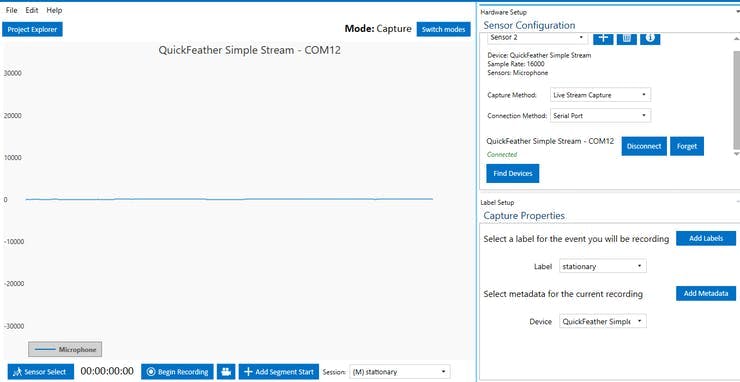
所以我只能选择使用麦克风来捕捉无人机叶片声音中的异常情况。所以我通过串行固件加载了简单的流音频,然后启动 DCL 通过串行本身收集数据。
由于印度的 Covid 19 大流行,我不得不从工作场所班加罗尔赶往家乡。因此,除了少数开发板之外,没有任何硬件。
因此,我将使用快速羽毛板和用于模拟无人机风扇的计算机风扇来模拟整个设置
现在我训练了模型并得到了结果
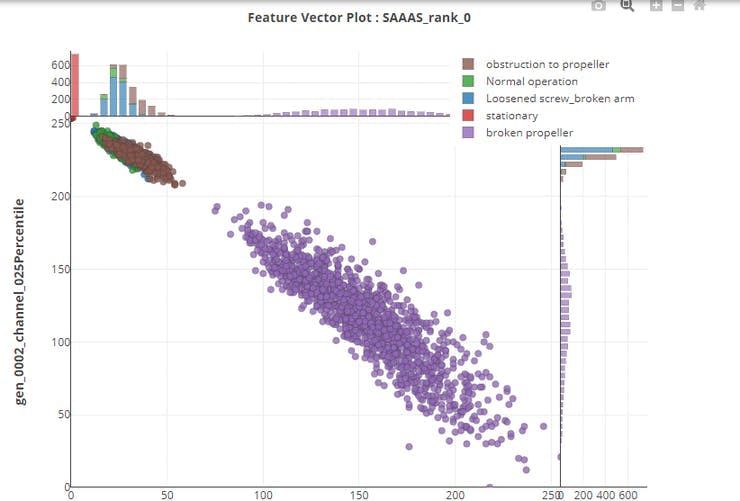
第 4 步:测试模型
第 4 步:测试模型
我已经上传了测试数据并对其进行了分类,现在我可以使用这些数据在分析工作室本身上测试我的模型。
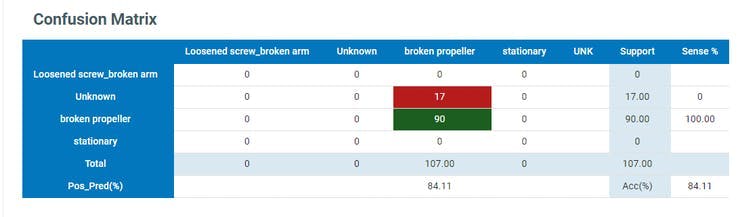
混淆矩阵在这里显示了一个很好的数字。
第 5 步:工作视频和演示:
第 5 步:工作视频和演示:
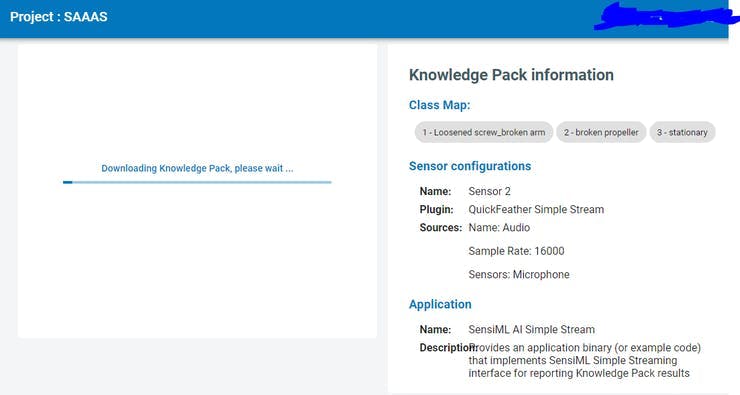
根据您的要求下载生成的模型。如果您想更改输出文本并修改某些内容,您可以随时选择您有权编辑和测试内容的代码版本。在这里,我正在下载我需要的 .bin 文件,因为我将使用树莓派上快速羽毛的输出信息。
这是该项目的工作视频和演示
结论:我们正处于一个必须转向电动汽车的阶段,否则我们将无法控制或减少气候变化。基于无人机或基于 UGV 的交付是未来。例如,考虑送餐,至少在像 zomato 和 swiggy 这样的印度公司
2020 财年,印度每月平均有 1070 万客户在该平台上订购食物,平均每月频率超过三倍。在截至 2020 年 12 月的九个月中,99.3% 的外卖订单来自 Zomato 的移动应用程序。
这些交付是在使用不可再生燃料的车辆上单独进行的。这使得该过程效率低下。基于无人机的食品配送是最后一英里配送的最佳替代品,我们的主动预测性维护设备将有助于充电站的诊断检查。当未来充满自动送货车辆时,这将成为新常态。
接触式充电始终是最好的充电方式,因为没有无线充电中常见的 40g% 能量损失。将导体嵌入无人机的腿中有助于我们快速、整齐地为设备充电。
我想在竞赛的线路供电类别下提交我的项目。
参考资料:
A. Kanawaday 和 A. Sane,“使用 IoT 传感器数据对工业机器进行预测性维护的机器学习”,2 017 第 8 届 IEEE 软件工程和服务科学国际会议 (ICSESS) ,2017 年,第 87-90 页,doi: 10.1109 /ICSESS.2017.8342870。
- A. Kanawaday 和 A. Sane,“使用 IoT 传感器数据对工业机器进行预测性维护的机器学习”,2 017 第 8 届 IEEE 软件工程和服务科学国际会议 (ICSESS) ,2017 年,第 87-90 页,doi: 10.1109 /ICSESS.2017.8342870。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




