
资料下载


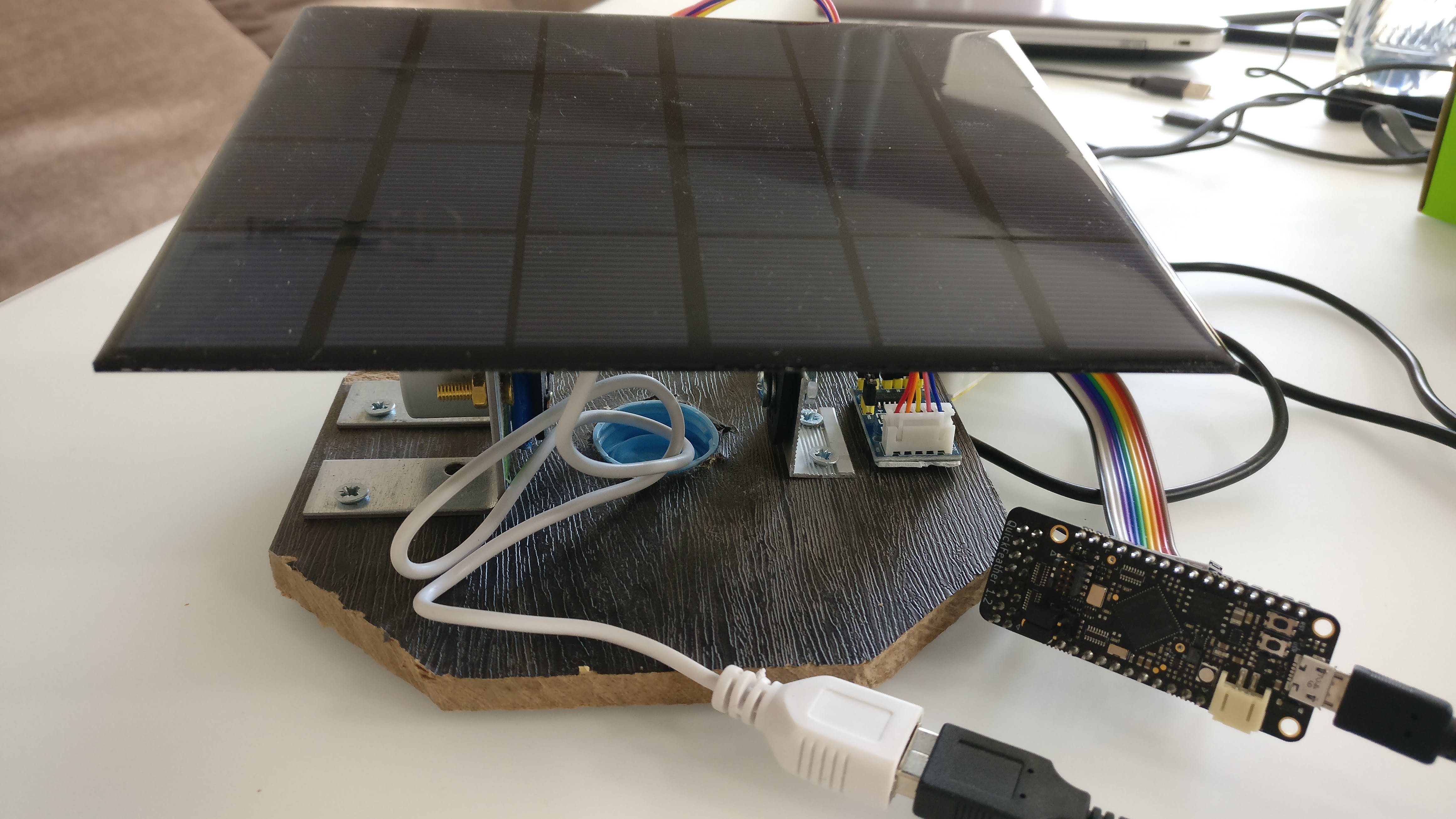
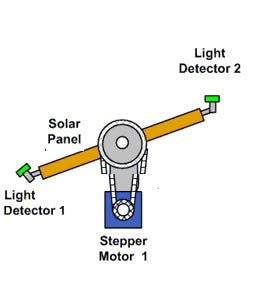
简单的单轴太阳能跟踪器
百灵千岛酱
分享资料个
描述
为了拯救我们的星球,需要使用更多的收入能源,如太阳能。我制作了原型太阳能跟踪器,它可以让我们更有效地产生能量。
固定倾斜角度太阳能电池阵列产生的电力全天效率较低,因为太阳能电池阵列并非始终直接面向太阳(最佳角度)。太阳在赤道上每小时从东向西移动 15 度。阳光入射和太阳能电池板朝向之间的角度差越大,基于余弦公式的损失越大。
其次,由于地球自转轴的倾斜,太阳全年横穿赤道南北方向也有±23.5°的变化。即使面对最佳角度的固定阵列也会有轻微的损失。
制作底盘
开始我们的工作 will make Base.

连接电机

我们在电机和支架之间进行连接
安装支架

结果:
程序和插件sheme部分。
1.步进电机控制。
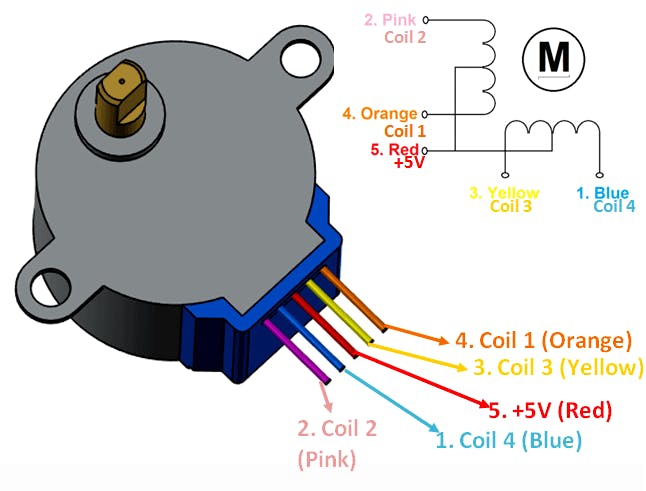
我在 ULN2003 上使用带有电源驱动器的 28BYJ 48 5V。
了解算法控制的,我们将在电机方案里面看到:
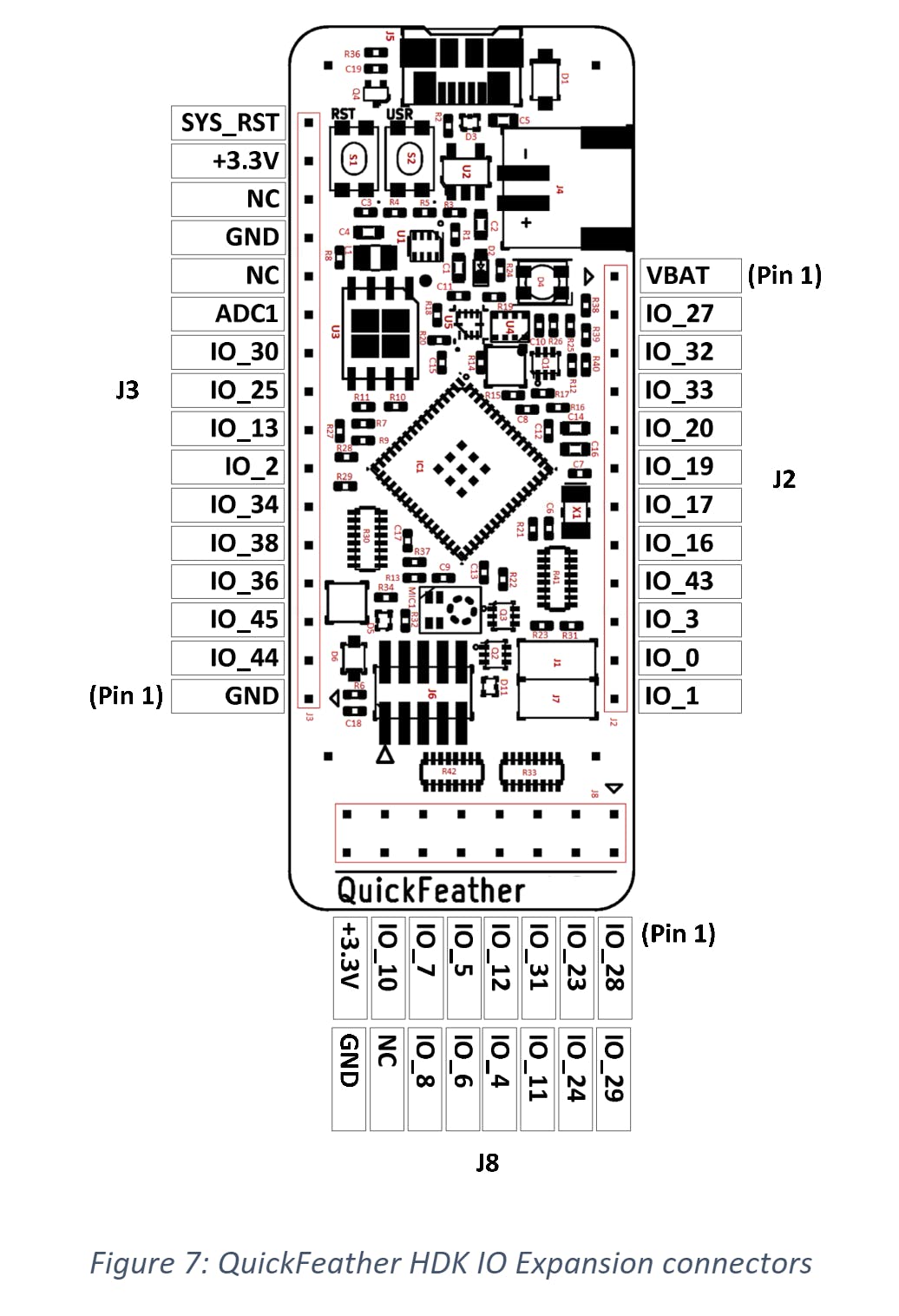
对于控制,我在 QuckFeather 板上选择了引脚:
IO_31 映射到 GPIO 4
IO_23 映射到 GPIO 7
IO_30 映射到 GPIO 3
IO_28 映射到 GPIO 2
对于控制步进电机,我们有三种算法:波、半步和全步。下图:
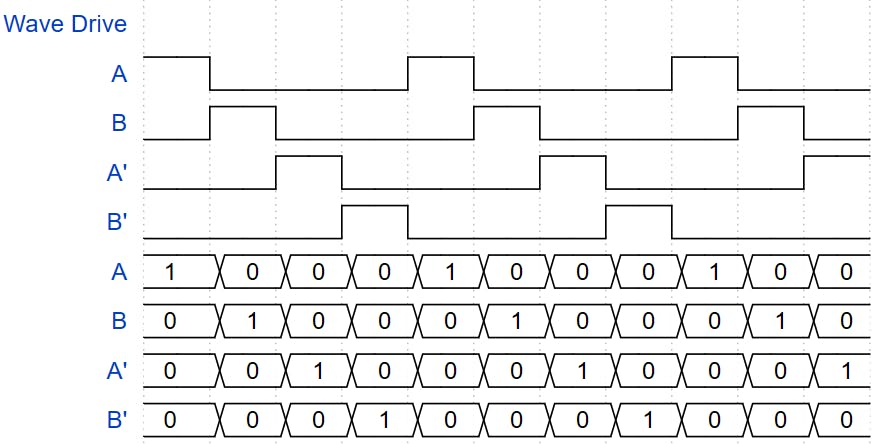
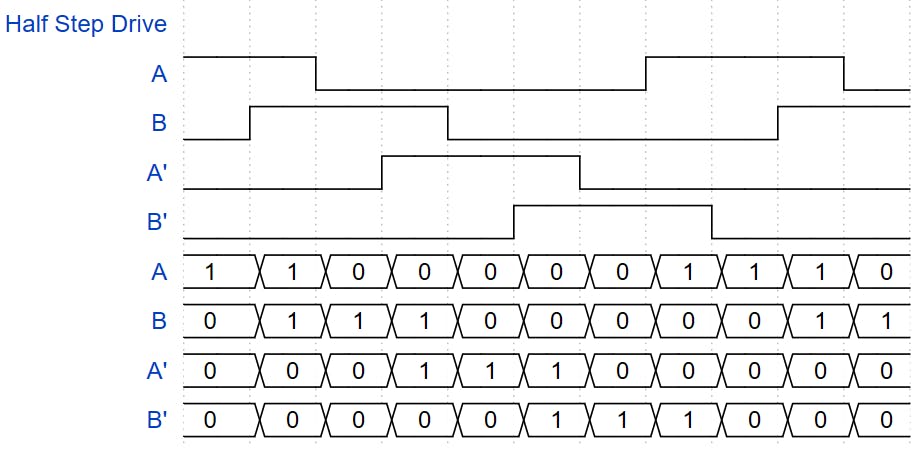
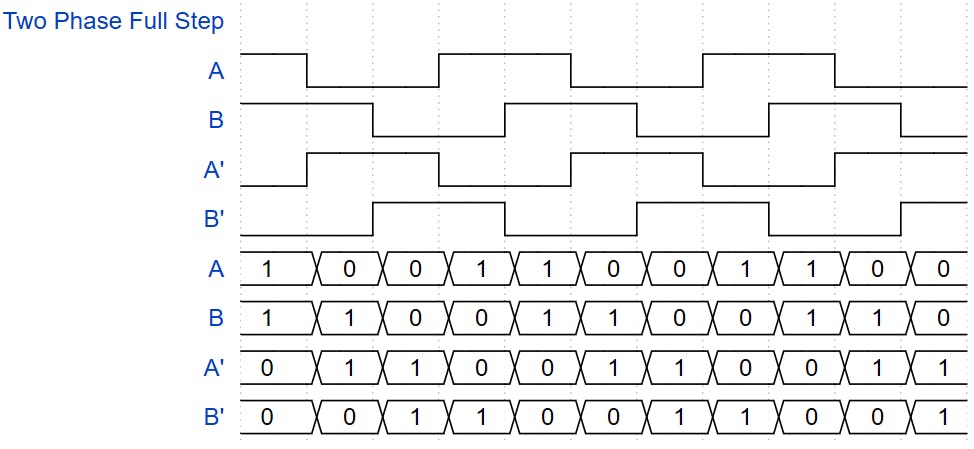
我最后选。我使用来自 gitHub qorc-sdk\qf_apps\qf_helloworldsw 的示例并对其进行修改。零件代码 - 生成最后一张图:
int dl = 5;
HAL_GPIO_Write(2, true);
HAL_GPIO_Write(3, false);
HAL_GPIO_Write(4, false);
HAL_GPIO_Write(7, true);
vTaskDelay(dl);
HAL_GPIO_Write(2, true);
HAL_GPIO_Write(3, true);
HAL_GPIO_Write(4, false);
HAL_GPIO_Write(7, false);
vTaskDelay(dl);
HAL_GPIO_Write(2, false);
HAL_GPIO_Write(3, true);
HAL_GPIO_Write(4, true);
HAL_GPIO_Write(7, false);
vTaskDelay(dl);
HAL_GPIO_Write(2, false);
HAL_GPIO_Write(3, false);
HAL_GPIO_Write(4, true);
HAL_GPIO_Write(7, true);
vTaskDelay(dl);
可变 dl - deley,改变速度旋转步进电机。
使用引脚 IO_31、IO_23、IO_30、IO_28 我添加到 pin_cfg_table.c 添加块每个引脚。
// Stepper motor pins
{ // setup pin steper motor
.ucPin = PAD_31,
.ucFunc = PAD31_FUNC_SEL_GPIO_4,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
{ // setup pin steper motor
.ucPin = PAD_23,
.ucFunc = PAD23_FUNC_SEL_GPIO_7,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
{ // setup pin steper motor
.ucPin = PAD_30,
.ucFunc = PAD30_FUNC_SEL_GPIO_3,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
{ // setup pin steper motor
.ucPin = PAD_28,
.ucFunc = PAD28_FUNC_SEL_GPIO_2,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
2. ADC和光电传感器。
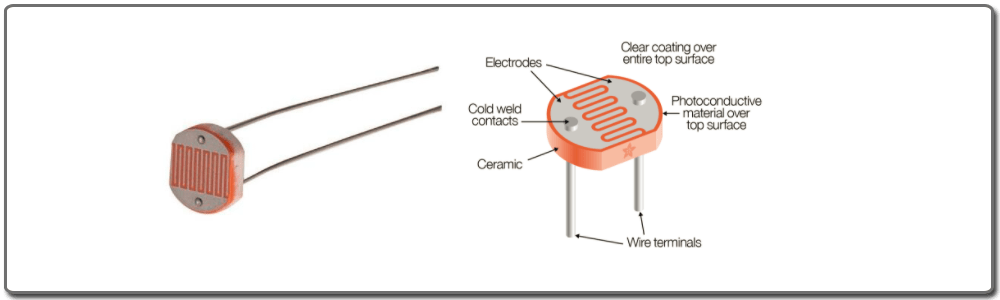
要获取有关光量的数据 - 我在 QuckFeather 板上使用光敏电阻和 ADC1 输入。
下面的光敏电阻:
对于测试使用 ADC1 转换器,我使用该代码:
static void checkAnalogInput(const struct cli_cmd_entry *pEntry)
{
uint16_t iCurrentBatteryLevel = 0; ///< 12-bit integer from ADC conversion unit
char snum[5];
(void)pEntry;
HAL_ADC_Init(ADC_CHANNEL_1, 1); // Enable photo measurement
HAL_ADC_StartConversion(); // start ADC conversion
vTaskDelay(25); // Conversion takes about 25ms
HAL_ADC_GetData(&iCurrentBatteryLevel); // get the ADC reading
// convert 123 to string [buf]
itoa(iCurrentBatteryLevel, snum, 10);
CLI_puts(snum);
return;
}
我将此方法添加到 main_dbg_cli qf_menu.c 表单项目 helloworldsw 中。
与控制器的连接:
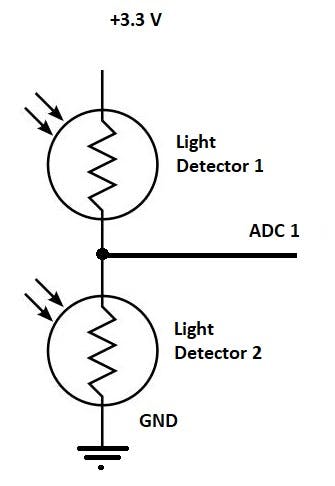
在中间点光探测器是 1.5V 这个值对于 ADC 来说很大,它可以测量 4095。我在 3.3 电源和顶部光敏电阻之间添加了二极管。这改变了工作点。
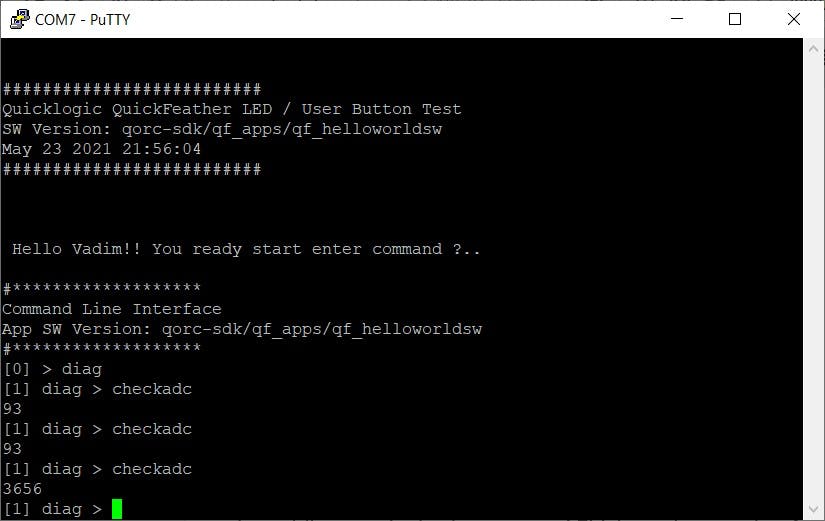
我调用函数运行 ADC - checkadc。
CLI_CMD_SIMPLE( "checkadc", checkAnalogInput, "start solar track" )
下面的例子:
为了开始跟踪太阳能,我添加了 commad - starttrack。
CLI_CMD_SIMPLE( "starttrack", starttrack, "start solar track" )
您可以在 gitHub 中看到的代码。
测试工作:
玻璃破碎传感器。
太阳能电池板可能由于各种原因而损坏。我们制造传感器碎玻璃。
我们可以使用 SensiML Data Capture Lab 和 Using SensiML Analytic Studio。并学习我们的 QuickFeather。
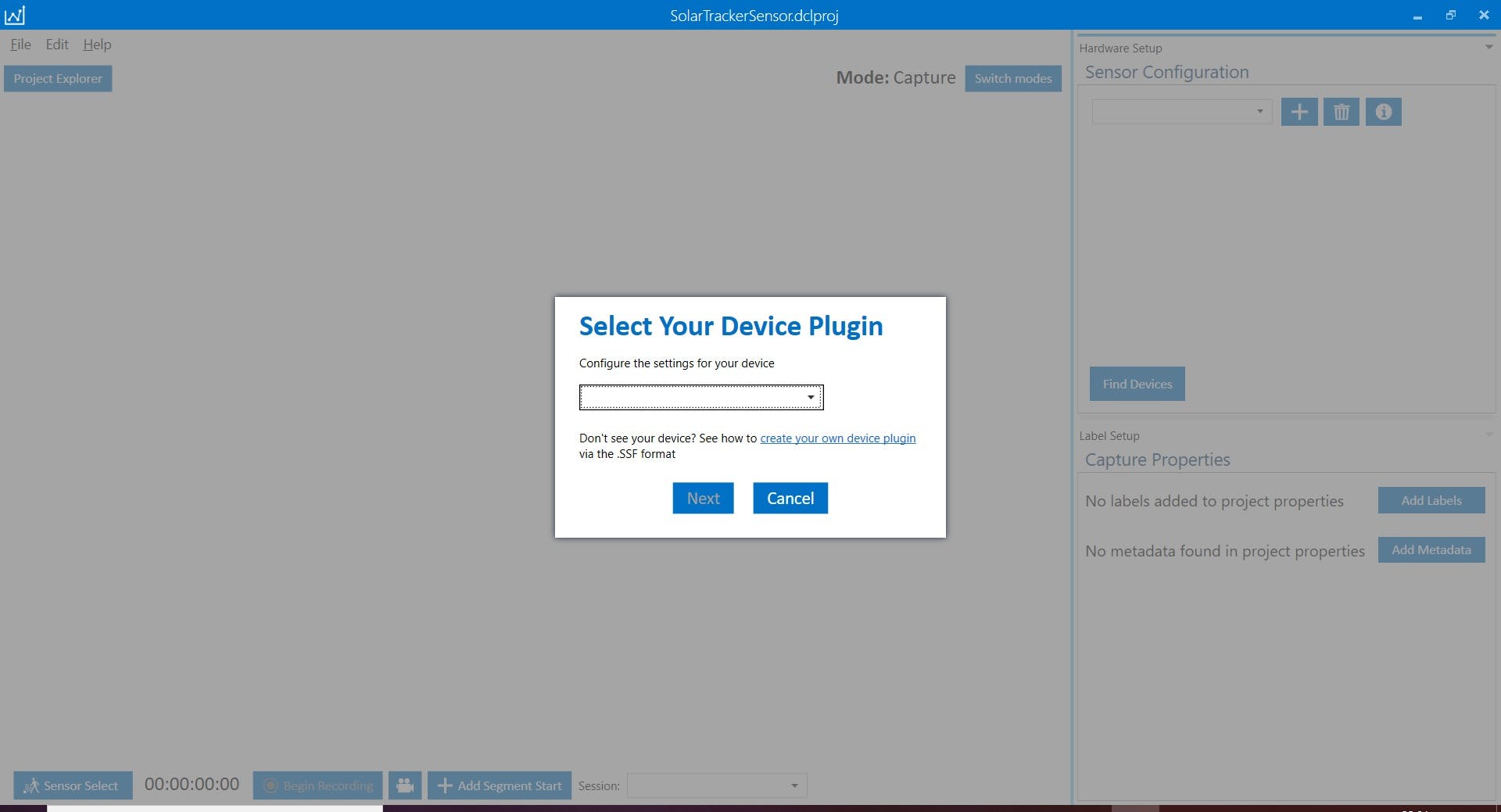
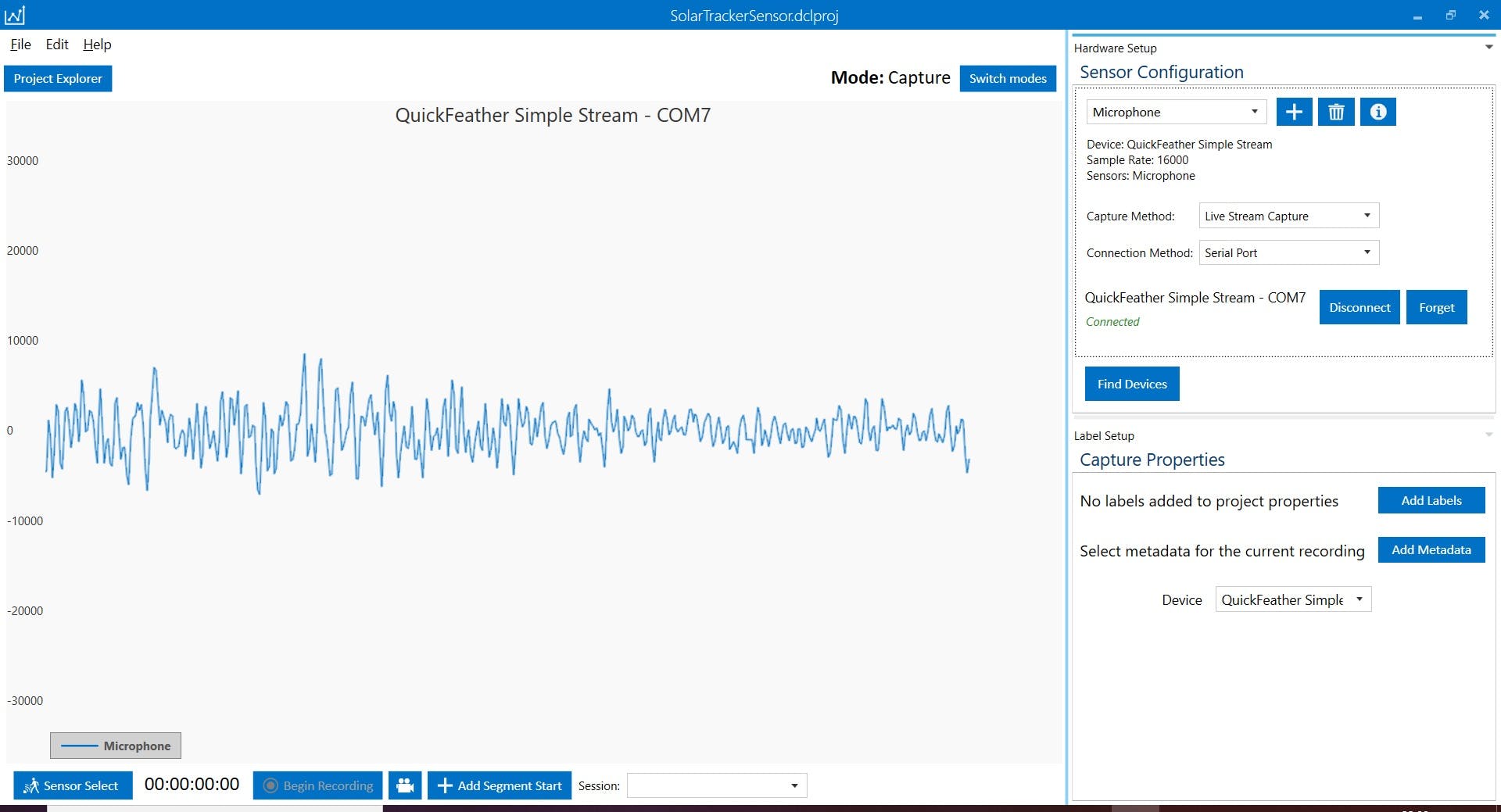
打开 SensiML 数据采集实验室。切换到捕获。
添加设备进行捕获。选择 QuickFeather Simple Stream,捕获源 - 音频,选择复选框麦克风。我取名麦克风。接下来需要单击按钮 Find Devices 并在搜索后选择编号 COM 端口。我们将看看 COM7 上的 QuickFeather Simple 流。
需要创建标签后使用按钮添加标签。我添加了两个 - 环境和碎玻璃。选择当前标签和捕获信号使用按钮Begin Recording 。
接下来切换到标签资源管理器,您可以指定名称会话。我打电话给 - 手动并采取模式手动。在我分开来分割之后。为此,您可以使用鼠标和右键。
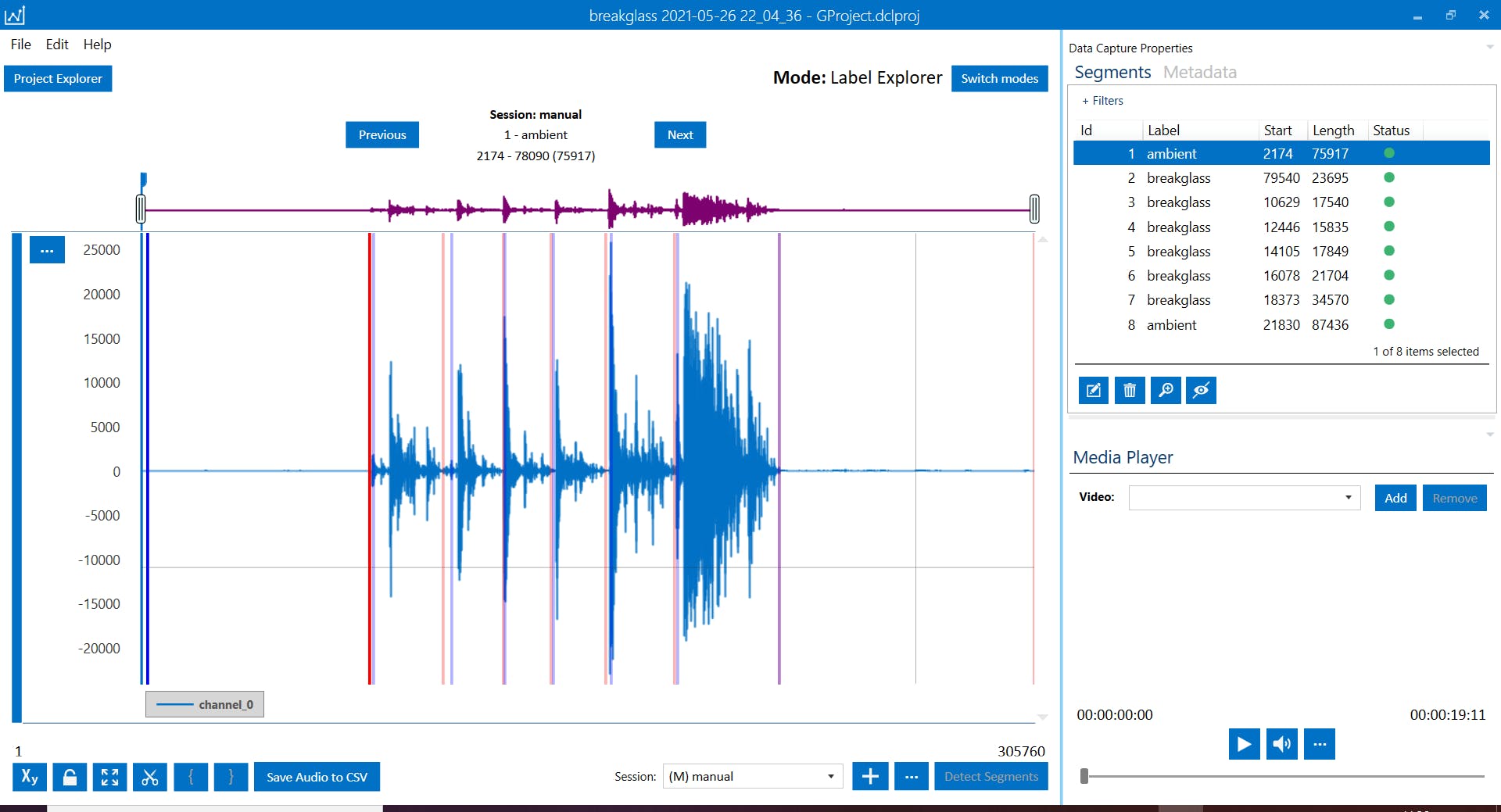
在段表中添加每个段标签。保存项目。
在我们运行 SensiML Analytic Studio 之后。并打开我们的项目。
所有步骤都在文档中描述,我的步骤在下面的屏幕截图中。
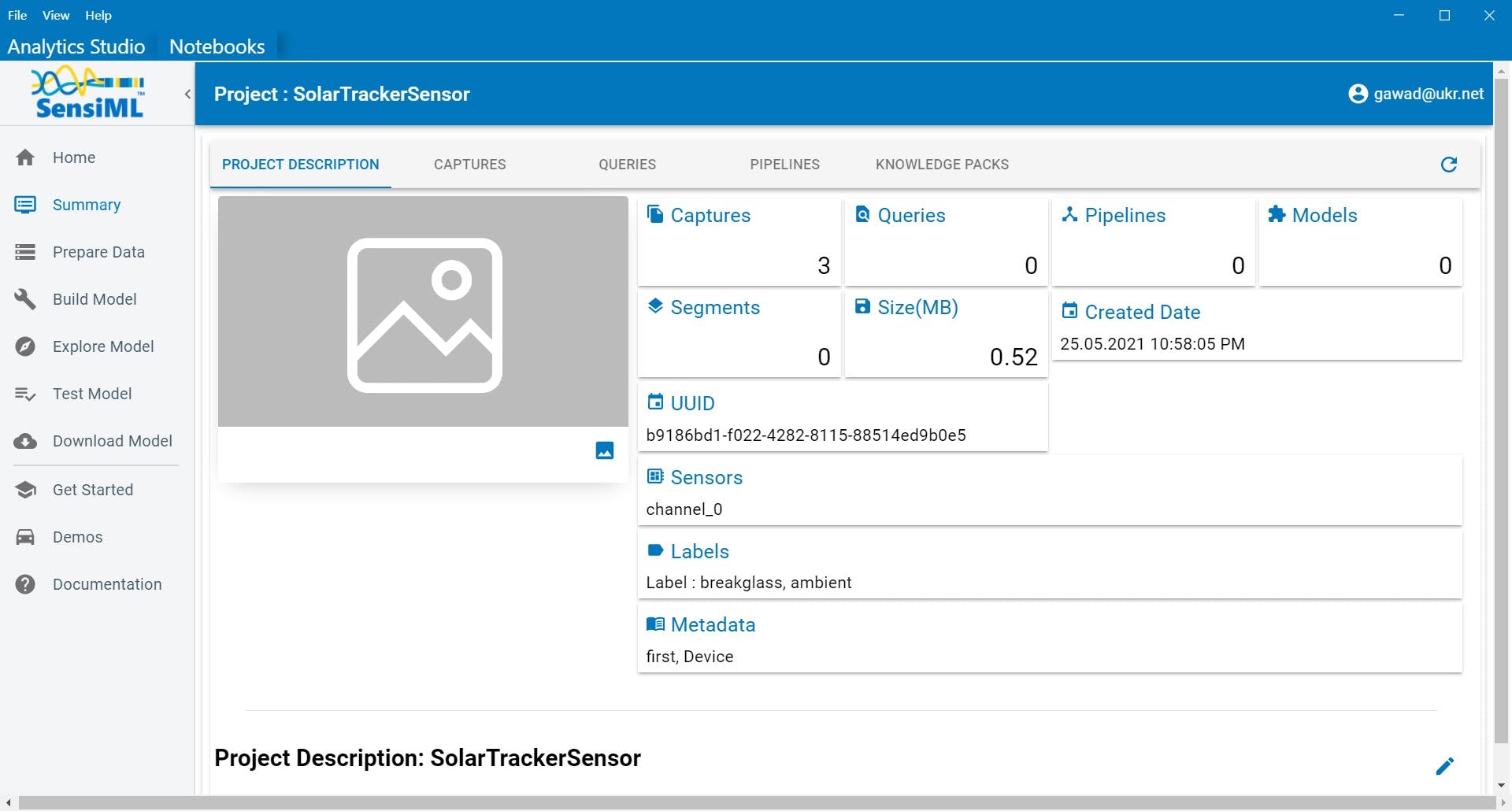
检查我们的结果。
结论
该跟踪器可用于自主电源,例如为农业领域的高级覆盖网络和偏远地区的街道照明提供基站 Helium 网络。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





