
资料下载


×
PID的软件及仿真实现
消耗积分:2 |
格式:pdf |
大小:0.45 MB |
2023-04-03
分享资料个
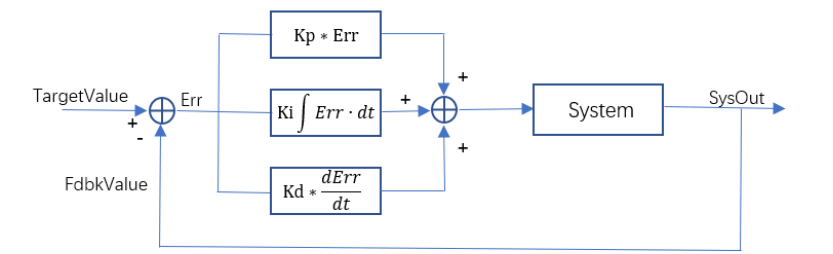
PID是自动控制中常采用的调节器,通过对目标值与实际值的差值(也可称为误差)进行比例( P )、积分( I )、微分( D)运算的结果作为执行对象的输入,从而改变执行对象的输出,最终使得输出(实 际值)与目标值相同,最终完成控制,模拟PID可以抽象为下图。其中: 1.TargeValue:由用户设定的目标值 2.FdbkValue:系统实际值(通常使用传感器测量) 3.Err=TargetValue-FdbkValue:误差 4.SysOut:系统输出,通常将该值直接作为反馈值
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




