
资料下载


×
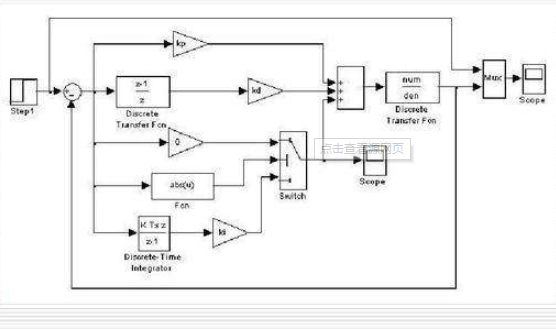
如何才能使用MATLAB进行数字PID控制器的仿真
消耗积分:0 |
格式:rar |
大小:0.10 MB |
2019-10-10
分享资料个
PID 控制算法简单应用广泛, 但是其参数整定方法繁杂。利用Matlab 可以方便地仿真, 实现PID 参数整定。
按偏差的比例(portional)、积分(integral)和微分(derivative)进行控制的调节器, 简称PID 调节器。在工业系统中, 大多有储能元件存在, 这就使系统对外作用的响应有一定的惯性, 且能量和信息传输过程中, 由于管道、长线等原因也引入一些时间上的滞后, 因此, 单按偏差进行比例调节, 很难取得较好的控制效果, 所以引入偏差的积分调节以提高精度, 引入偏差的微分来消除系统惯性的影响, 这就形成了按偏差的PID 调节系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





