
资料下载


微型能源转型第2部分之软件介绍
张玲
分享资料个
描述
上周,我们讨论了“微型能源转换”演示的硬件。本周我们将介绍软件。对于那些关注过我以前的项目的人,您可能会知道我倾向于关注事物的教学方面,而不是代码效率。对于 Arduino Mega,这通常不是什么大问题。因此,我倾向于仅使用 C++ 对象将代码拆分为功能模块,如下图所示:
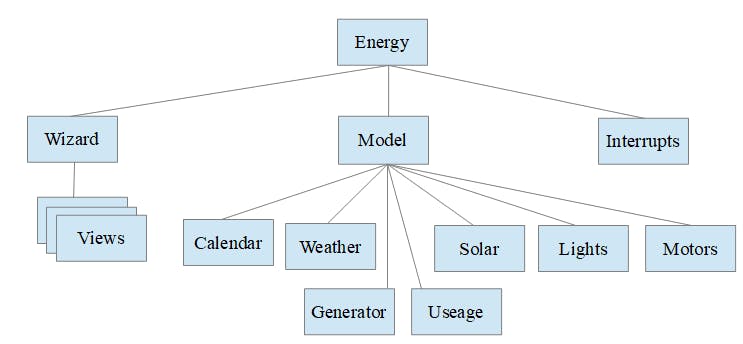
这些模块中的大多数将具有一个setup()和一个loop()功能,这些功能在层次结构更高层的模块的setup()和中使用。loop()顶层(能量)演示了这种方法:
...
#include "Wizard.h"
#include "Interrupts.h"
#include "Model.h"
...
static Interrupts interrupt;
static Wizard wizard;
static Model model;
...
void setup() {
Serial.begin(9600);
Serial.println(F("SETUP ENERGY TRANSITION DEMO"));
interrupt.setup();
model.setup();
wizard.setup();
...
}
void loop() {
wizard.loop();
if ( interrupt.getSecondsFlank()) {
interrupt.clear();
...
switch ( balance ) {
case 0:
wizard.update();
break;
case 1:
...
break;
default:
break;
}
}
}
很明显,该架构大致遵循模型-视图-控制器 (MVC) 模式, Adafruit 的 2.8 英寸 LCD 屏幕使用向导。我将在下一篇博客中介绍这部分内容。
现在我们将专注于模型;中断主要用于创建一个稳定的 0.1 秒(秒和分钟)计时器,用于为电机提供稳定的类似 PWM 的输出,因为它们连接到多路复用器,而不是直接连接到输出阿杜诺。
//Activate interrupt Timer2 (0.1 sec)
ISR(TIMER2_COMPA_vect) {
loopCounter++;
motors.handleInterrupt(200);
lights.handleInterrupt();
interrupt.flank = true;
if ( interrupt.getLock() )
return;
int_counter++;
int_counter %= SECONDS;
if ( int_counter == 0 )
interrupt.sec_flank = true;
else
return;
interrupt.min_flank = false;
interrupt.tensec_flank = false;
min_counter++;
interrupt.checkInitialisation();
min_counter %= MINUTES;
if ( min_counter == 0)
interrupt.min_flank = true;
if (( min_counter % TEN_SEC ) == 0)
interrupt.tensec_flank = true;
}
粗略地说,该模型由三类模块组成:
- 环境,包括时间(日历)和天气模拟器
- 输入和输出,读取太阳能电池板并控制 LED 和电机
- 公园布局,将输入和输出重新计算为对实际太阳能公园有意义的数字。
大多数这些模块都相当简单,所以我不会深入研究代码本身。唯一需要注意的是SparkFun 的两个 16 通道模拟/数字多路复用器,一个用于输入(太阳能电池板),一个用于输出(LED 和电机)。多路复用器非常适合输入,因此太阳能电池板的代码非常简单:
Solar::Solar() {}
void Solar::setup( int smpl) {
pinMode(A15, INPUT);
for ( int i = 0; i < 3; i++) {
pinMode(SS0 + i, OUTPUT);
digitalWrite(SS0 + i, LOW);
}
samples = smpl;
counter = 0;
}
uint16_t Solar::read(byte number) {
switch ( number ) {
case 0:
digitalWrite(SS0, LOW);
digitalWrite(SS1, LOW);
digitalWrite(SS2, LOW);
digitalWrite(SS3, LOW);
break;
case 1:
digitalWrite(SS0, HIGH);
digitalWrite(SS1, LOW);
digitalWrite(SS2, LOW);
digitalWrite(SS3, LOW);
break;
case 2:
digitalWrite(SS0, LOW);
digitalWrite(SS1, HIGH);
digitalWrite(SS2, LOW);
digitalWrite(SS3, LOW);
break;
case 3:
digitalWrite(SS0, HIGH);
digitalWrite(SS1, HIGH);
digitalWrite(SS2, LOW);
digitalWrite(SS3, LOW);
break;
case 4:
digitalWrite(SS0, LOW);
digitalWrite(SS1, LOW);
digitalWrite(SS2, HIGH);
digitalWrite(SS3, LOW);
break;
case 5:
digitalWrite(SS0, HIGH);
digitalWrite(SS1, LOW);
digitalWrite(SS2, HIGH);
digitalWrite(SS3, LOW);
break;
case 6:
digitalWrite(SS0, LOW);
digitalWrite(SS1, HIGH);
digitalWrite(SS2, HIGH);
digitalWrite(SS3, LOW);
break;
case 7:
digitalWrite(SS0, HIGH);
digitalWrite(SS1, HIGH);
digitalWrite(SS2, HIGH);
digitalWrite(SS3, LOW);
break;
case 8:
digitalWrite(SS0, LOW);
digitalWrite(SS1, LOW);
digitalWrite(SS2, LOW);
digitalWrite(SS3, HIGH);
break;
case 15:
digitalWrite(SS0, HIGH);
digitalWrite(SS1, HIGH);
digitalWrite(SS2, HIGH);
digitalWrite(SS3, HIGH);
break;
default:
digitalWrite(A15, LOW);
digitalWrite(SS0, LOW);
digitalWrite(SS1, LOW);
digitalWrite(SS2, LOW);
digitalWrite(SS3, LOW);
break;
}
int result = 0;
for ( int i = 0; i < samples; i++) {
delay( READ_DELAY );
result += analogRead(A15);
}
values[number]=result/samples;
return values[number];
}
uint16_t Solar::get(byte number) {
return values[number];
}
void Solar::loop() {
read( counter++ );
counter%=NR_OF_PANELS;
}
遗憾的是,这些多路复用器没有锁存功能,因此它们不太适合输出,至少在我们这里使用它们的方式上是这样。基本上它们一次只能控制一个输出,因此组合多个输出需要您非常快速地迭代它们,并且接受您想要的输出越多,最大输出将必须由所有输出共享。对于电机来说,这不是一个大问题,因为它们无论如何都必须缓慢转动,并且附加质量的惯性允许某种脉冲宽度调制 (PWM)类方法,其中各种电机将其所需的输出分配给总时间(一秒)。这需要由中断处理程序来控制(另见上面的代码):
void Motors::handleInterrupt( uint16_t total ) {
if (!enable)
return;
uint16_t results[3];
calcSpeed( results, total );
if ( counter < results[0]) {
if ( results[0] > 0 ) {
motor(WALRUS, HIGH);
}
} else if ( counter < results[0] + results[1] ) {
if ( results[1] > 0 ) {
motor(WATERMILL, HIGH);
}
} else if ( counter < results[0] + results[1] + results[2]) {
if ( results[2] > 0 ) {
motor(WINDMILL, HIGH);
}
}
if ( counter >= total ) {
motor(WALRUS, LOW);
motor(WATERMILL, LOW);
motor(WINDMILL, LOW);
counter = 0;
} else {
counter++;
}
}
由于这些限制,决定仅在电机关闭时运行 LEDS,而不是同时运行太多。这些由 16 位掩码控制:
void Lights::handleInterrupt() {
if (!enable)
return;
uint16_t shift = 1;
if ( mask == 0 ) {
led(15, LOW);
} else {
for (int i = 0; i < 7; i++) {
bool result = shift & mask;
if ( result )
led(i, result);
shift <<= 1;
}
}
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



