
资料下载


×
基于S7300PLC的运动定位系统设计任晓耕
消耗积分:1 |
格式:pdf |
大小:671KB |
2017-03-08
#Freedom
分享资料个
基于S7_300PLC的运动定位系统设计_任晓耕
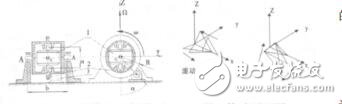
随着现代科学技术的不断进步, 自动化产业朝着精密化发展。精确运动控制的需求越来越迫切。目前在国内运动定位系统方面, 实现快速准确的运动定位具有很强的现实意义与市场需求。本课题提出的基于 S7-300 PLC 的运动定位系统,机械部分采用陀螺仪式运动结构,控制部分选用西门子 S7-300 PLC,传动电机与驱动器分别采用松下 A4 系列伺服电机与西门子 SIMODRIVE 611U 驱动 器, 上 位机 监 控 系统 选 用 组 态 软 件 WinCC, 以 PLC 控制双伺服系统实现了二维平面的精确快速定位。本运动定位系统可应用于喷涂、机械手搬运、雕刻等领域。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





