
资料下载


第六届电磁组哈尔滨华德学院课程教材
248504233
分享资料个
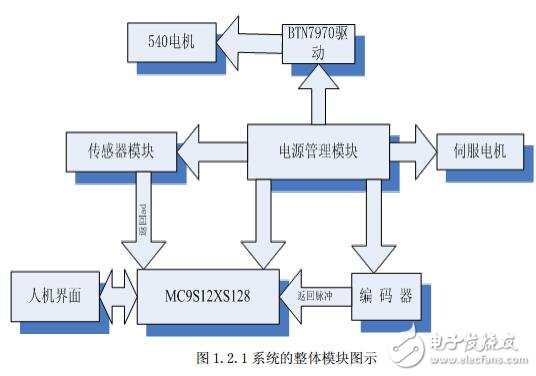
智能车底盘(包括电机、转向舵机、电池等);本系统各部分模块都能协同地工作。由于系统中存在感性负载,会有大电流,我们细化了电源模块,目的在于独立各个模块,降低各个模块之间的干扰和保证各个模块的电压、电流的稳定。系统的整体模块图示如图 1.2.1 所示。
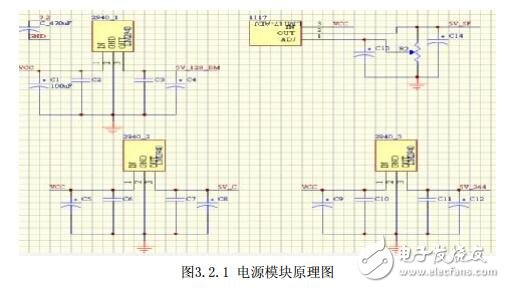
比赛要求智能车电源只能使用指定型号的7.2V 2000mAh Ni-Cd 电池供电。在本智能车系统中,电源就相当于阳光,阳光不充足系统就不能稳定的运行,也就不能实现功能,因而电源模块的搭建至关重要。我们经过大量实验选型,最终我们采用集成三端稳压芯片。集成三端稳压器主要有两种:一种是线性稳压芯片,另外一种是开关型稳压芯片。线性稳压芯片输出纹波小,电路简单,但是功耗较大,效率较低,典型芯片为LM7805;开关稳压芯片则功耗小,效率高,但是输出纹波大,电路复杂,典型芯片为LM2596。对于单片机来说,单片机本身功耗低,但是它对电源要求相对较高。经过实验比对,LM2940和LM1117性能较优。两者都为低压差线性稳压器件,LM2940 最大输出电流为1A,另外LM1117-ADJ为输出可调稳压器件。最后我们选择LM2940 作为单片机主要供电稳压芯片。由于舵机需要4.5V-5.5V的工作电压,最后我们利用LM1117-ADJ输出可调的特性为舵机提供电压。因为电路中存在感性负载,存在大电流,为了最大限度降低各个部分对单片机的干扰,我们单独采用一片 LM2940对单片机和起跑线检测模块进行供电。传感器也单独用一片LM2940供电。而其他需要5V供电的模块则采用另一片LM2940进行供电。具体电源模块原理图如图3.2.1 所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






