
资料下载


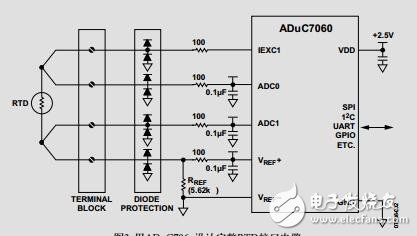
使用ADuC706x微控制器实现RTD接口和线性化
分享资料个
微控制器是将微型计算机的主要部分集成在一个芯片上的单芯片微型计算机。微控制器诞生于20世纪70年代中期,经过20多年的发展,其成本越来越低,而性能越来越强大,这使其应用已经无处不在,遍及各个领域。例如电机控制、条码阅读器/扫描器、消费类电子、游戏设备、电话、HVAC、楼宇安全与门禁控制、工业控制与自动化和白色家电(洗衣机、微波炉)等。
RTD(Real Time Differential),实时动态码相位差分技术。实时动态测量中,把实时动态码相位差分测量称作常规差分测量,RTD的精度在1-5 m内是比较稳定的。因为在实时动态测量中,最先在码相位测量上引入差分技术,所以把实时动态码相位差分测量称作常规差分GPS测量技术。RTD由下列三部分组成;1. 基准台卫星接收机及接收天线;2.移动台卫星接收机及接收天线;3.数据传输包括校正值处理与数字调制解调器,数据发射机及数据接收机。RTD系统使用的卫星接收机单频机就可队但要求接收通道要尽可能的多,基淮台要有10个以上接收通道,标淮配置是12个通道。这是为了能接收到所有通过的卫星,以保证其它移动台因环境差异不能接收到全部通过卫星时,仍能对应基淮台有4个以上卫星进行选择的可能性。实施RTD的关键是数据传输链,基准台要将大量的信息传送到移动台,差分定位精度的好坏与差分校正值的更新率与数据传输的准确性密切相关,因此对数据链的要求是数据传输准确可靠,速度快。一般要求数据传输的误码率应小于10’,差分数据的更新率应小于 10 S。RTK和RTD的主要区别:RTK:载波相位(L1、L2)差分技术RTD:码(C/A码、P码)差分技术两者最大区别在解算精度的差异上,RTD的精度只能达到亚米级,而RTK采用双频可以达到厘米级。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




