
资料下载


车规级振荡器为激光雷达提供解决方案
激光雷达被比喻为汽车的“眼睛”, 兼具测距远、角度分辨率优、受环境光照影响小等特点,且无需深度学习算法,可直接获得物体的距离和方位信息,与其他传感器互补结合使用可帮助感知系统减小探测误差,因而被大多数整车厂、Tier1 认为是L3 级及以上自动驾驶必备的传感器。
工作原理
激光雷达系统主要由激光发射模块、激光接收模块、信息处理模块和扫描模块组成,其基本工作原理是:激光器发射激光脉冲,激光调制器通过光束控制器控制发射方向和线数,最后通过发射光学系统将激光发射至目标物体,激光反射后到激光接收系统,光电探测器接收后产生接收信号,经放大处理和数模转换后,信息处理模块计算后得出周围环境信息,精确测量目标的位置(距离与角度)、形状(大小)及状态(速度、姿态)。
测距精度是激光雷达的核心性能指标之一,高精度时钟是保证激光雷达检测距离精度的关键,而晶振作为基本的时钟源在其中扮演着重要角色。
车载激光雷达对于晶振的应用要求如下:
①高精度、高稳定性:激光雷达在进行扫描和测量时,需要对激光器进行精准的时间控制,需要使用全温范围内频差±100ppm 以内的有源晶振作为时钟源,以确保激光测距的精度和稳定性;
②高 抗 干 扰 能 力 :激 光 雷 达 工 作 环 境 通 常 比 较 恶 劣 , 存 在 各 种 干 扰 源 ,如机械震动、电磁干扰等。因此,晶振需要具有高抗干扰能力,以确保其在复杂环境中仍能保持稳定的工作;
③宽工作温度范围:车载激光雷达通常安装在车顶或车前,需要在高温环境下工作,要求晶振可在-40~﹢125℃车规级宽温范围内稳定可靠运行;
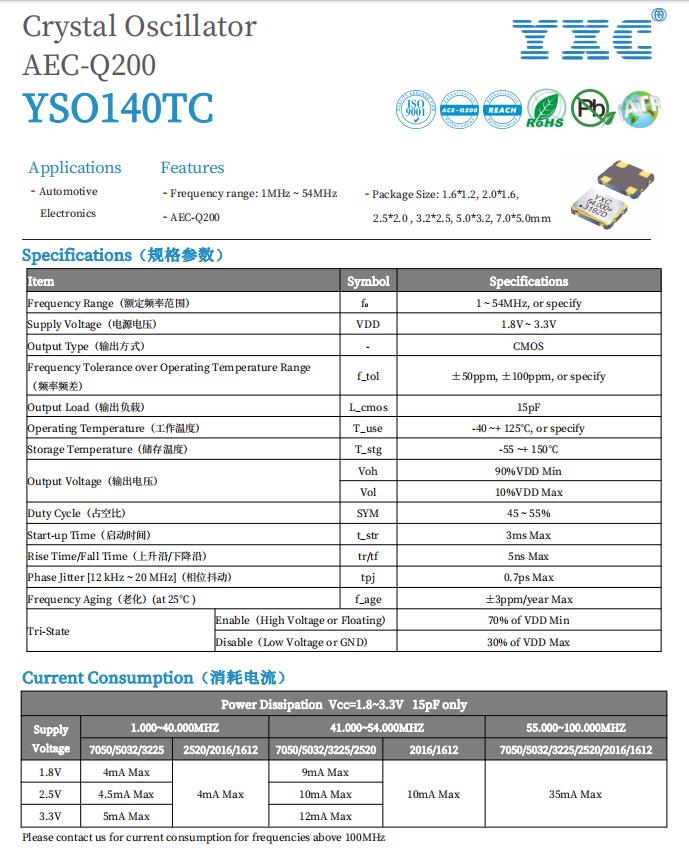
④小体积:激光雷达的产品趋势是集成化、小型化,因此晶振需要满足3225 或 2016 小尺寸特点,以满足激光雷达小型化的设计要求。针 对 车 载 激 光 雷 达 电 路 设 计 需 求 , 推 荐 使 用 YXC 车 规 级 振 荡 器
YSO140TC 系列,具体参数如下:推荐理由如下:
①车规级有源晶振,通过AEC-Q200、IATF16949,可满足汽车苛刻的运行环境,极大提高电子零部件及车辆的可靠性;
② 支 持 1MHz~54MHz 频 率 范 围 , 满 足 车 载 激 光 摄 像 头 常 用 频 点25MHz/50MHz的电路设计要求;
③-40~+125℃宽工作温度范围,具有足够的耐热与抗寒能力,以保证长期正常运行稳定性;
④全温范围内频差±100ppm以内,具备高精度、高稳定性的特点;
⑤提供 3225/2016/1612 小尺寸封装,可满足空间结构紧张的固态激光雷达小型化设计需求;
⑥具有良好的抗震、抗腐蚀特性,有效降低电磁干扰。若有其他参数指标要求,欢迎咨询。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





