
资料下载


Arduino激光雷达扫描和Java渲染
李晶
分享资料个
演示
怎么运行的
该项目由两部分组成。Arduino 端处理所有伺服运动并从激光雷达传感器获取测量读数。Java 端将球形点转换为笛卡尔点并将它们呈现为 3D。它们通过串行端口相互通信。用户可以使用类似游戏的 fps 控件在场景中移动以获得更好的体验。
数学
项目中有两个舵机。一个将用作平移 (Phi) 角,另一个用作倾斜 (Theta) 角。我们从激光雷达传感器获得的读数将成为半径。这意味着设备本身将位于点 (0,0,0)。从 Arduino 发送到 Java 程序的每个数据集都由这三个数字(半径、phi、theta)组成,前导零以保持一致性。
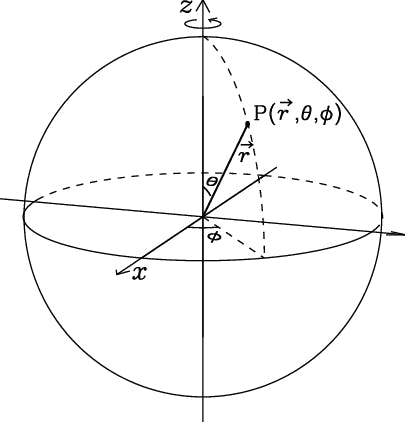
从这里我们必须将这些球面点转换为 Cartesian(x, y, z) 以便我们可以在我们的 Java 程序中正确地绘制它们。
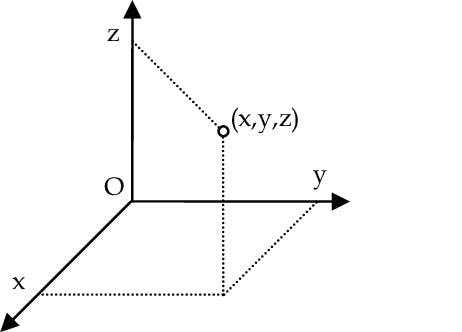
我们可以使用这些公式实现这些转换。
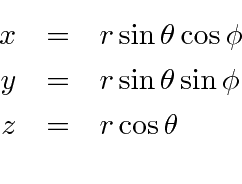
注意:如果您查看 Java 代码并注意到 x、y 和 z 的某些值被交换,有时甚至设置为负数,那是因为计算机坐标系也不同。例如,在计算机坐标系中,x 是水平的,而不是 y。Y positive 下降,而不是上升。像这样的东西。对公式所做的这些修改只是为了让 Java 在正确的位置呈现点。
串口通讯
我用 Arduino Uno 开始了这个项目,但遇到了串行端口与伺服系统冲突的问题。他们不能同时工作。当数据来回发送时,舵机会不断抖动。从研究中我了解到这是使用 SoftwareSerial 的常见问题。我找到了一些解决这个问题的方法,但它们太麻烦了,甚至对我来说都没有完全奏效。我决定改用 Arduino Mega,它解决了抖动问题。这是因为 Mega 有多个串口。
沟通的步骤
- Java开启端口并监听数据
- Arduino 进行第一次测量,将伺服系统移动到下一个位置并等待来自 Java 的“Okay”信号
- Arduino 以这种格式将数据发送到 Java 000,000,000
- Java等待所有的数据分片达到一定量就可以转换
- Java 转换这些数字,绘制点,并向 Arduino 发送一个字符作为“Okay”信号
- 一旦 Arduino 接收到信号,它就会在新的角度位置重复之前的操作
Java 必须等待的原因是因为即使您告诉 Arduino 发送 9 位数字和 2 个逗号,通过串行发送数据也不能那样工作。只要有可能,它就会发送它想要的任何数据片段。所以我们希望 Java 直到接收到的所有数据看起来都像它可以识别的东西。
我使用 USB 电缆作为串行连接,但我相信如果需要无线,也可以使用蓝牙模块。
为项目提供动力
我用一块 5v 的墙砖来运行伺服系统,因为我只是讨厌处理电池并尽可能避免使用它们。激光雷达传感器通过 Arduino 5V 供电。当然,Arduino 使用用作串行端口的相同 USB 电缆供电。
请随时发表有关该项目的评论或问题。谢谢!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




