
资料下载


RBF神经网络与机器人控制系统的MATLAB仿真设计
分享资料个
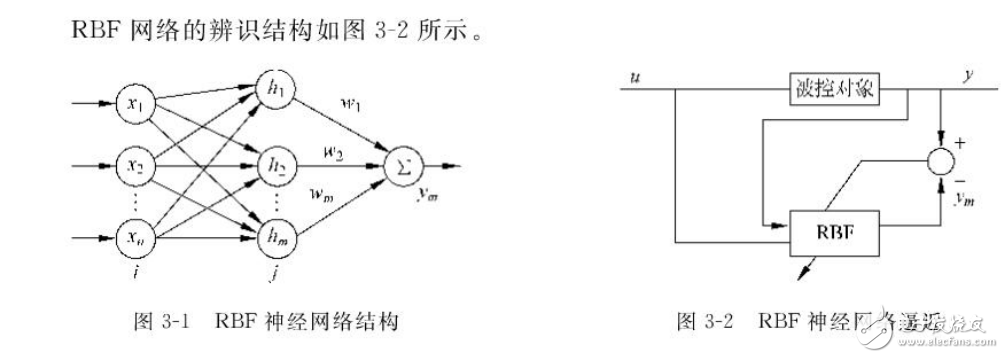
RBF 神经网络
径向基丽数(Radial Basis Function,RBF )神经网络是由J.Moody 和C.Darken 在20世纪80 年代末提出的一种神经网络,它是具有单隐层的三层前馈网络。RBF 网络模拟了人脑中局部调整、相互覆盖接收域(或称感受野,Receptive Field )的神经网络结构,已证明
RBF 网络能任意精度逼近任意连续函数。RBF 网络的学习过程与BP 网络的学习过程类似,两者的主要区别在于各使用不同的作用函数。BP 网络中隐含层使用的是Sigmoid 函数,其值在输人空间中无限大的范围内为非零值,因而是一种全局逼近的神经网络;而RBF 网络中的作用函数是高斯基函数,其值在输人空间中有限范围内为非零值,因而RBF 网络是局部逼近的神经网络。
理论上,三层以上的BP 网络能够逼近任何一个非线性函数,但由于BP 网络是全局逼近网络,每一次样本学习都要重新调整网络的所有权值,收敛速度慢,易于陷人局部极小,很难满足控制系统的高度实时性要求。RBF 网络是一种三层前向网络,由输人到输出的映射是非线性的,而隐含层空间到输出空间的映射是线性的,而且RBF 网络是局部逼近的神经网络,因而采用RBF 网络可大大加快学习速度并避免局部极小问题,适合于实时控制的要求。采用RBF 网络构成神经网络控制方案,可有效提高系统的精度、鲁棒性和自适应性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





