
资料下载


×
基于脉冲推力的半被动双足机器人无模型神经网络控制
消耗积分:3 |
格式:rar |
大小:5.42 MB |
2018-01-14
分享资料个
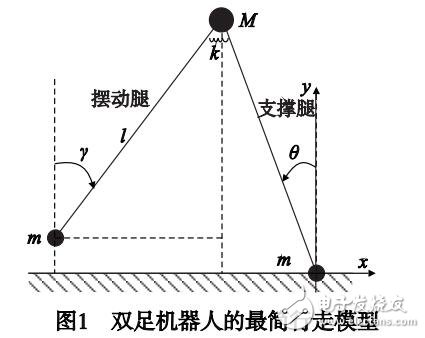
研究了半被动双足机器人的平面稳定行走控制问题。以最简行走模型为动力学模型,采用沿支撑腿方向的脚后跟脉冲推力作为行走动力源。考虑到系统模型的非线性特征,将基于三角函数扩展的函数链接型人工神经网络控制算法引入到机器人系统中,以产生系统所需的脉冲推力。采用基于数据驱动的无模型同步扰动随机逼近算法对神经网络的权值进行更新,利用庞加莱映射方法分析了半被动双足机器人行走的稳定条件。在理论分析的基础上,对该算法进行了仿真研究。仿真结果表明,算法在收敛快速性上要优于迭代学习控制算法,可以实现双足机器人平面上的稳定周期行走,且雅可比矩阵的特征值均位于单位国内,满足系统的稳定条件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






