
资料下载


常用自动控制系统设计,DSP嵌入式系统开发典型案例
分享资料个
随着自动化技术、计算机技术、集成芯片制造技术的飞速发展,自动控制系统
的设计、实现也出现了飞跃式的发展,从单输入单输出系统发展到多输入多输出系
统,从基本的 PID(Proportional Integral Differential)控制发展到目前种类繁多的最
优控制、鲁棒控制、非线性控制、模糊控制、神经网络控制、滑模控制以及多种控
制方法的结合控制技术,从自动控制系统的硬件实现来看,从 20 世纪 60 年代的分
立元器件到 20 世纪 70 年代的中、小规模集成电路、再到 80 年代流行的以单片机为
核心的数字化自动控制系统,然后到目前的以 DSP(数字信号处理器)为核心的高
速、精密、智能的自动控制系统。
自动控制技术几乎应用于所有的工业部门,由于工业现场的工作环境、工作内
容、控制对象、执行设备、动力设备、工作指标各不相同,因此工业控制的设计方
法和实现手段也非常多,归纳起来,工业控制一般包括如下类别:过程控制、运动
控制、速度伺服控制、位置伺服控制、点对点(I/O)控制等。过程控制和点对点
(I/O)控制相对速度较慢,而运动控制和速度伺服控制以及位置伺服控制相对速度
较快。
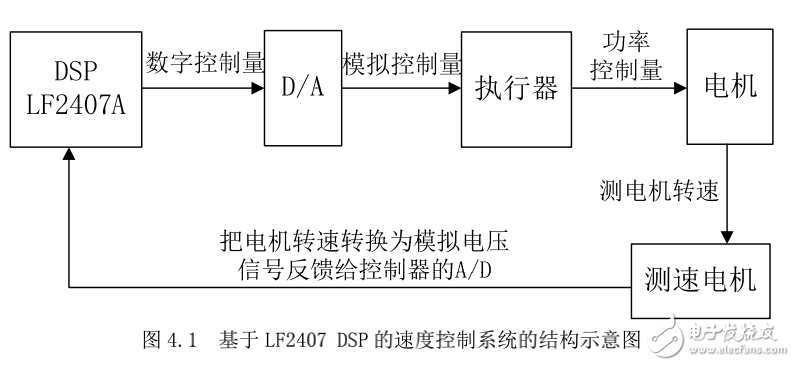
本章将基于 TI 公司 LF2407 和外接 DA 转换芯片,实现数字 PID 控制器,采用
的 PID 控制算法是增量式 PID 控制算法,然后在此硬件平台上,以增量式 PID 控
制算法为基础介绍基于 LF2407 的模糊 PI 控制器的实现
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






