
资料下载


×
多节点远程数据传输系统的硬件接口设计和相应的软件设计
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-10-23
分享资料个
针对在测量环境较差的场合中,要求测量系统体积小,数据处理性能高且远程传输稳定的问题,提出了利用DSP 和CAN总线技术进行远程数据采集传输的方案。系统通过CAN 控制器进行远程多节点间的数据传输,与上位机采用DSP 的SCI串口进行通信。介绍了系统的硬件接口设计和相应的软件设计。经测试,系统实现了高效稳定的数据传输处理,具有很高的实际应用价值。
1 引言
控制局域网CAN属于现场总线范围,是德国Bosch 公司从20 世纪80 年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速度可达1 M bit/ s. CAN 协议的最大特点是废除了传统的站地址编码,而对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11 位或29 位二进制数组成,因此可以定义211或229个不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
2 系统设计
在很多野外或测量环境比较差的地方,需要采用体积小,数据处理性能高,并且远程传输稳定的数据处理传输系统。针对这种要求,设计了多节点远程数据采集传输系统。在远端将要检测的各个节点的数据采集送到DSP进行处理,通过DSP的CAN控制接口,将各节点数据传输到CAN 总线上,然后用DSP 的串行通信口与上位机进行数据交换和控制操作。
系统采用了DSP 作为微处理器,充分利用DSP 器件的体积小,功耗低,数据处理功能强大的优点;同时采用CAN 总线来传输数据,不仅结构简单(只有2 根线与外部连接) ,传输稳定性高而且传输距离远,尤其是可对网络内各个节点通信数据块进行独立编码,加大了数据接收的灵活性,扩展了网络节点数。系统在数据采集处理同时,可以方便地与当地PC 利用DSP 的SCI串行口进行通信。基于以上优点的方案设计解决了在很多工作环境恶劣,检测点较多的场合下的数据处理传输问题。
美国德州仪器(TI) 公司的DSP24xx 系列是TI 公司推出的低价格高性能的16 位定点DSP 芯片,是专为数字电机控制和其他控制应用而设计的芯片。选用了TMS320LF2407 芯片作为数据处理芯片,与上位PC 机进行数据传输。TMS320LF2407 自带CAN控制器(符合CAN 总线210 协议) ,且可以通过设置内部寄存器的自测试位来实现CAN 控制器的自发自收功能,为调试CAN 通讯的下位机提供了方便。基于芯片的此功能模块,硬件设计只要通过CAN 驱动器(电平转换) 接到CAN 总线上,就可以与其他CAN 节点进行通讯。DSP与上位机通信部分可以通过SCI 异步串行通信口来实现。系统结构图如图1所示。
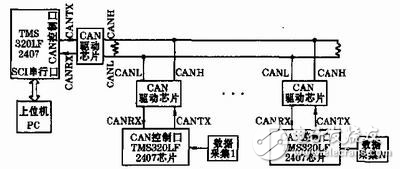
图1 系统结构图
3 硬件设计
采用的DSP 芯片自带了CAN 控制器模块和SCI 串行通信口,但是在系统各节点的连接和与PC 机通信上存在电平驱动转换的问题。
CAN 驱动芯片采用TI 公司的UC5350 驱动芯片。UC5350控制器区域网转换器专为采用CAN 通信的工业应用而设计,具有最高可达1 M bit/ s 的高速收发特性,并且至少可以连接110 个节点。图2 为UC5350 与TMSLF2407 芯片的硬件连接图。
需要注意的是,在CAN 传输网络的两个终端CAN 节点上,节点的CANH和CANL 两根信号线之间一定要跨接1个120 Ω的电阻R2 ,这是为了消除传输中的回流干扰问题。
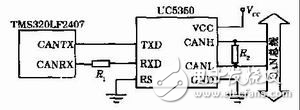
图2 CAN 驱动硬件图
DSP 与上位机的通信部分,采用TMS320LF2407 的SCI 异步串口来完成。由于TMS320LF2407 的串行口输入输出均为TTL电平,而IBM- PC 机的串行口是按RS - 232 - C 标准设计的,必须经过电平转换才能实现两者之间的通信。设计中采用了符合RS - 232 标准的驱动芯片MAX232 进行电平之间的转换。图3 为DSP 与PC 串口之间的接口硬件图。
1 引言
控制局域网CAN属于现场总线范围,是德国Bosch 公司从20 世纪80 年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速度可达1 M bit/ s. CAN 协议的最大特点是废除了传统的站地址编码,而对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11 位或29 位二进制数组成,因此可以定义211或229个不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
2 系统设计
在很多野外或测量环境比较差的地方,需要采用体积小,数据处理性能高,并且远程传输稳定的数据处理传输系统。针对这种要求,设计了多节点远程数据采集传输系统。在远端将要检测的各个节点的数据采集送到DSP进行处理,通过DSP的CAN控制接口,将各节点数据传输到CAN 总线上,然后用DSP 的串行通信口与上位机进行数据交换和控制操作。
系统采用了DSP 作为微处理器,充分利用DSP 器件的体积小,功耗低,数据处理功能强大的优点;同时采用CAN 总线来传输数据,不仅结构简单(只有2 根线与外部连接) ,传输稳定性高而且传输距离远,尤其是可对网络内各个节点通信数据块进行独立编码,加大了数据接收的灵活性,扩展了网络节点数。系统在数据采集处理同时,可以方便地与当地PC 利用DSP 的SCI串行口进行通信。基于以上优点的方案设计解决了在很多工作环境恶劣,检测点较多的场合下的数据处理传输问题。
美国德州仪器(TI) 公司的DSP24xx 系列是TI 公司推出的低价格高性能的16 位定点DSP 芯片,是专为数字电机控制和其他控制应用而设计的芯片。选用了TMS320LF2407 芯片作为数据处理芯片,与上位PC 机进行数据传输。TMS320LF2407 自带CAN控制器(符合CAN 总线210 协议) ,且可以通过设置内部寄存器的自测试位来实现CAN 控制器的自发自收功能,为调试CAN 通讯的下位机提供了方便。基于芯片的此功能模块,硬件设计只要通过CAN 驱动器(电平转换) 接到CAN 总线上,就可以与其他CAN 节点进行通讯。DSP与上位机通信部分可以通过SCI 异步串行通信口来实现。系统结构图如图1所示。
图1 系统结构图
3 硬件设计
采用的DSP 芯片自带了CAN 控制器模块和SCI 串行通信口,但是在系统各节点的连接和与PC 机通信上存在电平驱动转换的问题。
CAN 驱动芯片采用TI 公司的UC5350 驱动芯片。UC5350控制器区域网转换器专为采用CAN 通信的工业应用而设计,具有最高可达1 M bit/ s 的高速收发特性,并且至少可以连接110 个节点。图2 为UC5350 与TMSLF2407 芯片的硬件连接图。
需要注意的是,在CAN 传输网络的两个终端CAN 节点上,节点的CANH和CANL 两根信号线之间一定要跨接1个120 Ω的电阻R2 ,这是为了消除传输中的回流干扰问题。
图2 CAN 驱动硬件图
DSP 与上位机的通信部分,采用TMS320LF2407 的SCI 异步串口来完成。由于TMS320LF2407 的串行口输入输出均为TTL电平,而IBM- PC 机的串行口是按RS - 232 - C 标准设计的,必须经过电平转换才能实现两者之间的通信。设计中采用了符合RS - 232 标准的驱动芯片MAX232 进行电平之间的转换。图3 为DSP 与PC 串口之间的接口硬件图。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




