
资料下载


×
DSP无刷直流电机全数字化控制系统解析
消耗积分:1 |
格式:rar |
大小:0.3 MB |
2017-10-30
分享资料个
永磁无刷直流电机(Brushless DC Motor,BLDCM)既具有同步电机的优点,又有直流电机优良的调速性能,在工业领域,尤其是调速和伺服系统中得到了广泛的应用。高速数字信号处理器(DSP)在伺服系统中的应用,大大简化了控制系统结构,提高了系统性能,使无刷直流电机的优点更加突出。
本文主要研究采用TI公司的TMS320LF2407A DSP作为控制器的无刷直流电机全数字化控制系统。
1控制系统硬件框图设计
由直流电动机的运动方程可知:加速度与电动机的转矩成正比,而转矩又与电动机的电流成正比,因此,要实现电机的高精度高动态性能控制,就需要同时对电机的速度、电流及位置进行检测和控制。图1是无刷直流电机控制系统框图,在系统中设置了速度调节器和电流调节器,分别调节电机的转速和电流,两者之间实行串级连接,把速度调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制PWM装置。
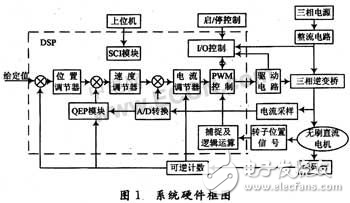
如图1所示,整个系统控制单元可分为两大部分:虚线框内的功能由TMS320LF2407A DSP组成的最小系统实现,他包括DSP和片外存储器,另一部分则为反馈信号采集部分。电流反馈信号由霍尔元件测得,通过F2407的A/D模块转化为数字量,转子位置信号则用于产生正确的转子换向,光电编码器检测电机的转动方向及转角并反馈回DSP系统,形成闭环控制。系统位置给定由上位机发出。三相交流输入经整流、稳压后为逆变电路提供直流电源,逆变电路的触发信号由上位机提供,其目的是输出占空比可调的PWM信号,通过调整PWM信号宽度以控制功率管的开、关时间,从而实现对无刷电机的控制。
2控制策略
本系统通过三闭环(即位置环、速度环、电流环)结构实现电机的伺服控制。如图2所示。
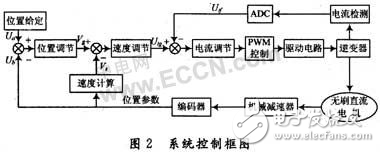
当电机处于运行状态时,给定的位置信号Ua与反馈位置信号Ub的偏差经过(位置环)PID调节得到速度的参考值Vg,控制器根据测出的反馈位置信息计算出当前转速ωs,Vg与ωs在DSP中进行PI计算(速度环)得到电流的给定电压参考值Uig,电机绕组电流反馈信号经过电流传感器的检测从A/D口送入DSP,经转换得到当前主回路的电流反馈电压值Uif将Uif与Uig进行PI计算,得到的电流调节器的输出去调节占空比,进而控制功率开关管的导通与关断,从而实现对无刷直流电动机位置、转速、电流或转矩的控制。
在三闭环控制系统中,电流环和速度环均为内环,位置环为外环。电流环的作用是提高系统的快速性,抑制电流环内部干扰,限制最大电流保障系统安全运行,电流环采用PI调节器。速度环的作用是增加系统抗负载扰动的能力,抑制速度波动,速度环采用PI调节器。位置环的作用是保证系统静态精度和动态跟踪的性能。位置环采用积分分离的PID控制,即在开始跟踪被控量时,先取消积分作用,使比例项迅速跟踪偏差的变化,当被控量接近新的设定值时再将积分作用加入。这样既可以避免超调又可缩短达到稳态的时间,起到了积分校正的作用。图3为位置阶跃响应曲线和位置阶跃式跟踪结果。
本文主要研究采用TI公司的TMS320LF2407A DSP作为控制器的无刷直流电机全数字化控制系统。
1控制系统硬件框图设计
由直流电动机的运动方程可知:加速度与电动机的转矩成正比,而转矩又与电动机的电流成正比,因此,要实现电机的高精度高动态性能控制,就需要同时对电机的速度、电流及位置进行检测和控制。图1是无刷直流电机控制系统框图,在系统中设置了速度调节器和电流调节器,分别调节电机的转速和电流,两者之间实行串级连接,把速度调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制PWM装置。
如图1所示,整个系统控制单元可分为两大部分:虚线框内的功能由TMS320LF2407A DSP组成的最小系统实现,他包括DSP和片外存储器,另一部分则为反馈信号采集部分。电流反馈信号由霍尔元件测得,通过F2407的A/D模块转化为数字量,转子位置信号则用于产生正确的转子换向,光电编码器检测电机的转动方向及转角并反馈回DSP系统,形成闭环控制。系统位置给定由上位机发出。三相交流输入经整流、稳压后为逆变电路提供直流电源,逆变电路的触发信号由上位机提供,其目的是输出占空比可调的PWM信号,通过调整PWM信号宽度以控制功率管的开、关时间,从而实现对无刷电机的控制。
2控制策略
本系统通过三闭环(即位置环、速度环、电流环)结构实现电机的伺服控制。如图2所示。
当电机处于运行状态时,给定的位置信号Ua与反馈位置信号Ub的偏差经过(位置环)PID调节得到速度的参考值Vg,控制器根据测出的反馈位置信息计算出当前转速ωs,Vg与ωs在DSP中进行PI计算(速度环)得到电流的给定电压参考值Uig,电机绕组电流反馈信号经过电流传感器的检测从A/D口送入DSP,经转换得到当前主回路的电流反馈电压值Uif将Uif与Uig进行PI计算,得到的电流调节器的输出去调节占空比,进而控制功率开关管的导通与关断,从而实现对无刷直流电动机位置、转速、电流或转矩的控制。
在三闭环控制系统中,电流环和速度环均为内环,位置环为外环。电流环的作用是提高系统的快速性,抑制电流环内部干扰,限制最大电流保障系统安全运行,电流环采用PI调节器。速度环的作用是增加系统抗负载扰动的能力,抑制速度波动,速度环采用PI调节器。位置环的作用是保证系统静态精度和动态跟踪的性能。位置环采用积分分离的PID控制,即在开始跟踪被控量时,先取消积分作用,使比例项迅速跟踪偏差的变化,当被控量接近新的设定值时再将积分作用加入。这样既可以避免超调又可缩短达到稳态的时间,起到了积分校正的作用。图3为位置阶跃响应曲线和位置阶跃式跟踪结果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





