
资料下载


×
硬件实时操作系统的设计
消耗积分:1 |
格式:rar |
大小:0.2 MB |
2017-10-31
分享资料个
随着嵌入式技术的发展,实时操作系统RTOS(Real Time Operating System)被越来越多地应用在嵌入式系统中,如:航空航天、工业控制、汽车电子和核电站建设等众多领域。对于现有基于软件实现的实时操作系统,单纯依靠改进调度算法已不能使其实时性有更大的提高。如果采用硬件逻辑实现RTOS中的任务调度、中断处理和定时器管理等功能,则可使其实时性和确定性显著提高。因为硬件逻辑独立于处理器运行,不占用处理器的处理时间,所节省的时间用于执行任务程序,从而提高了任务集合的可调度性和实时性。本文基于“外部处理器+FPGA”的硬件平台结构[1],在FPGA上设计和实现了硬件实时操作系统。
1 硬件实时操作系统的结构和运行原理
硬件实时操作系统能实现典型实时操作系统的各种功能模块,包括:任务调度内核、中断管理模块、定时器模块、资源管理模块和内存管理模块等[2]。为了实现稳定可靠的系统,本文采用逐步演进的方法。首先实现由任务调度内核(也称作硬件调度内核)、中断管理、定时器管理和接口软件构成的最小系统,然后逐步增加其他功能模块。
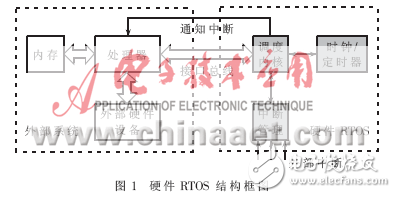
硬件RTOS的结构如图1所示。调度内核是系统的核心,负责任务的调度管理;中断管理模块负责管理外部中断;定时器模块负责任务延时和周期执行。硬件RTOS的数据通过接口总线与外部系统通信[3]。
任务调度内核使用FPGA的片内寄存器实现任务控制块TCB(Task Control Block)队列(简称任务队列)。所有未执行任务放在等待队列和就绪队列中。等待队列中的任务在条件满足时将变为就绪任务。本文中,等待任务主要等待定时器时间和中断到达。任务调度内核能在每个调度时机计算出优先级最高的就绪任务。调度内核采用抢占式调度机制,每个调度时机输出优先级最高的就绪任务。
中断模块接管处理器除通知中断以外的所有外部中断,中断服务程序称作“中断处理任务”,与普通任务一样被硬件内核调度。外部中断到来时,触发硬件内核的调度时机,保证中断任务的实时执行。此时,软件实时操作系统的中断嵌套已经转换为处理器中任务的抢占,高优先级的中断任务可以抢占低优先级任务。
定时器管理模块实现任务的延时和周期运行,在设定任务周期或延时时间后,每当设定时间到时便会使对应任务就绪,并触发硬件内核的调度时机,由后者执行一次任务调度。
接口总线硬件实现处理器与硬件RTOS之间的数据传输和事件通知。接口软件从功能上分为两类:(1)系统API。被应用程序调用,能通过接口总线向硬件RTOS发送命令。硬件RTOS收到命令后,解析数据,执行相应操作。(2)通知中断服务程序。硬件RTOS进行一次任务调度后,如果发现新“选出”的最高优先级就绪任务与当前处理器正在执行的任务不同,则需要进行现场切换。硬件调度内核将利用通知中断告知处理器该就绪任务的ID和堆栈地址,触发后者执行中断服务程序,以执行现场切换。
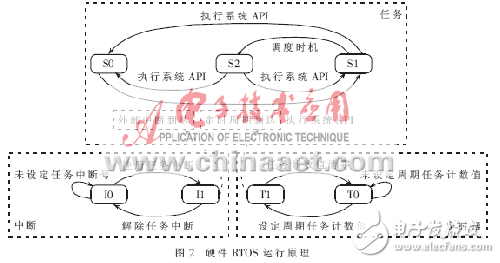
任务存在阻塞(S0)、就绪(S1)和运行(S2)三个状态,定时器存在停止(T0)、运行(T1)两个状态,中断模块存在无效(I0)、有效(I1)两个状态。图2描述了最小系统各模块的运行状态。
2 系统设计与实现
本文选用ARM9系列的处理器S3C2410和Actel公司的FPGA芯片APA075,用后者实现硬件实时操作系统,调度在处理器上执行的任务。
2.1 任务调度内核的设计实现
实时操作系统的核心是任务调度内核,其主要功能是根据调度算法,在每个调度时机确定下一个将要执行的任务,并适时进行现场切换。为此,调度内核需要维护一系列的任务队列(如就绪任务队列和等待任务队列),并在每个调度时机,根据优先级重新排列就绪队列,以计算出优先级最高的就绪任务。
合理的任务控制块是实现硬件调度内核的关键,应能根据调度算法分配优先级,并利于优先级比较,而且能够索引最终结果。根据上述需求,设计了如图3所示的任务控制块结构。其中ID为任务号,State为任务状态,Prio为任务优先级,SP_End为任务堆栈终止地址,Run_Time 为任务起始运行时间,End_Time为任务结束运行时间。起始和截止时间能根据特定算法分配任务的优先级。Delay_Counter为任务延时计数器,Timer_Counter为周期任务分频计数器,Int_Number为中断号。
1 硬件实时操作系统的结构和运行原理
硬件实时操作系统能实现典型实时操作系统的各种功能模块,包括:任务调度内核、中断管理模块、定时器模块、资源管理模块和内存管理模块等[2]。为了实现稳定可靠的系统,本文采用逐步演进的方法。首先实现由任务调度内核(也称作硬件调度内核)、中断管理、定时器管理和接口软件构成的最小系统,然后逐步增加其他功能模块。
硬件RTOS的结构如图1所示。调度内核是系统的核心,负责任务的调度管理;中断管理模块负责管理外部中断;定时器模块负责任务延时和周期执行。硬件RTOS的数据通过接口总线与外部系统通信[3]。
任务调度内核使用FPGA的片内寄存器实现任务控制块TCB(Task Control Block)队列(简称任务队列)。所有未执行任务放在等待队列和就绪队列中。等待队列中的任务在条件满足时将变为就绪任务。本文中,等待任务主要等待定时器时间和中断到达。任务调度内核能在每个调度时机计算出优先级最高的就绪任务。调度内核采用抢占式调度机制,每个调度时机输出优先级最高的就绪任务。
中断模块接管处理器除通知中断以外的所有外部中断,中断服务程序称作“中断处理任务”,与普通任务一样被硬件内核调度。外部中断到来时,触发硬件内核的调度时机,保证中断任务的实时执行。此时,软件实时操作系统的中断嵌套已经转换为处理器中任务的抢占,高优先级的中断任务可以抢占低优先级任务。
定时器管理模块实现任务的延时和周期运行,在设定任务周期或延时时间后,每当设定时间到时便会使对应任务就绪,并触发硬件内核的调度时机,由后者执行一次任务调度。
接口总线硬件实现处理器与硬件RTOS之间的数据传输和事件通知。接口软件从功能上分为两类:(1)系统API。被应用程序调用,能通过接口总线向硬件RTOS发送命令。硬件RTOS收到命令后,解析数据,执行相应操作。(2)通知中断服务程序。硬件RTOS进行一次任务调度后,如果发现新“选出”的最高优先级就绪任务与当前处理器正在执行的任务不同,则需要进行现场切换。硬件调度内核将利用通知中断告知处理器该就绪任务的ID和堆栈地址,触发后者执行中断服务程序,以执行现场切换。
任务存在阻塞(S0)、就绪(S1)和运行(S2)三个状态,定时器存在停止(T0)、运行(T1)两个状态,中断模块存在无效(I0)、有效(I1)两个状态。图2描述了最小系统各模块的运行状态。
2 系统设计与实现
本文选用ARM9系列的处理器S3C2410和Actel公司的FPGA芯片APA075,用后者实现硬件实时操作系统,调度在处理器上执行的任务。
2.1 任务调度内核的设计实现
实时操作系统的核心是任务调度内核,其主要功能是根据调度算法,在每个调度时机确定下一个将要执行的任务,并适时进行现场切换。为此,调度内核需要维护一系列的任务队列(如就绪任务队列和等待任务队列),并在每个调度时机,根据优先级重新排列就绪队列,以计算出优先级最高的就绪任务。
合理的任务控制块是实现硬件调度内核的关键,应能根据调度算法分配优先级,并利于优先级比较,而且能够索引最终结果。根据上述需求,设计了如图3所示的任务控制块结构。其中ID为任务号,State为任务状态,Prio为任务优先级,SP_End为任务堆栈终止地址,Run_Time 为任务起始运行时间,End_Time为任务结束运行时间。起始和截止时间能根据特定算法分配任务的优先级。Delay_Counter为任务延时计数器,Timer_Counter为周期任务分频计数器,Int_Number为中断号。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




