
资料下载


×
基于STC89C52单片机的客车安全系统设计解析
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-11-21
分享资料个
为增加客车的安全性,提出了一种基于STC89C52单片机同时具有防超载和防撞功能的客车安全系统。通过研究超声波测距原理和脉冲宽度调制原理,并对车身重量和障碍物的距离进行实时监测以实现其功能。对该系统的安全性能和测量精度进行了测试,结果表明,系统达到了设计要求。
统计表明,在关于客车的交通事故中,超速和超载是事故发生的主要原因。本设计针对如何预防因超速而产生的车辆撞击和防超载的发生进行了一次探索。当乘客全部上车后,车门关闭,智能车通过称重传感器进行称重,并将重量显示在液晶屏上,若重量超过额定数值,蜂鸣器报警、小车无法开动,以实现防超载的功能。小车开动后,超声波模块开始测距,当小车与前方障碍物的距离低于规定距离30 cm时,电机减速;当距离减小到安全距离以内15 cm时,小车停驶,直到前方车辆远离小车才继续行驶,起到了防撞的作用。本设计具有成本低、操作简便、体积小等特点。
1总体设计方案和工作原理
1.1总体设计方案
系统组成框图如图1所示,智能车以STC89C52作为主控芯片,使用电阻应变式传感器进行称重,并将采集到的数据通过模数转换后发送至单片机同时将结果显示在液晶屏上。文中使用HC-SR04模块实现超声波的收发,并将测得的数据传输给单片机,根据小车与障碍物的距离远近,产生不同的脉冲宽度调制信号以达到实时调节电机转速的目的,同时由1602液晶显示距离。
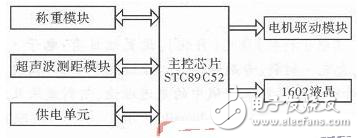
图1 系统总体框图
1.2电机调速原理
电机转速的快慢与输入电压的大小和通断有关,因此脉冲宽度调制(PWM)便成为了调节小车行驶速度的最佳方案。脉冲宽度调制,就是按照一定的频率接通和断开电源,并根据不同的情况来改变通断电源的时间。而电机转速快慢是通过改变电机上的平均电压实现的,平均电压值可通过电压的占空比来改变。如图2所示,当电源接通时,电机运转;断开时,电机停止;通电时间越长,电机转速越快。所以,根据PWM原理对电机按频率进行通电和断电,便可实现对电机速度的精确控制。电机在接通+6 V电压下能以最快速度运转,假设在电机持续接通电源,电机的转速能达到最大,设电机两端电压为Umax,而当电源按频率通断时
统计表明,在关于客车的交通事故中,超速和超载是事故发生的主要原因。本设计针对如何预防因超速而产生的车辆撞击和防超载的发生进行了一次探索。当乘客全部上车后,车门关闭,智能车通过称重传感器进行称重,并将重量显示在液晶屏上,若重量超过额定数值,蜂鸣器报警、小车无法开动,以实现防超载的功能。小车开动后,超声波模块开始测距,当小车与前方障碍物的距离低于规定距离30 cm时,电机减速;当距离减小到安全距离以内15 cm时,小车停驶,直到前方车辆远离小车才继续行驶,起到了防撞的作用。本设计具有成本低、操作简便、体积小等特点。
1总体设计方案和工作原理
1.1总体设计方案
系统组成框图如图1所示,智能车以STC89C52作为主控芯片,使用电阻应变式传感器进行称重,并将采集到的数据通过模数转换后发送至单片机同时将结果显示在液晶屏上。文中使用HC-SR04模块实现超声波的收发,并将测得的数据传输给单片机,根据小车与障碍物的距离远近,产生不同的脉冲宽度调制信号以达到实时调节电机转速的目的,同时由1602液晶显示距离。
图1 系统总体框图
1.2电机调速原理
电机转速的快慢与输入电压的大小和通断有关,因此脉冲宽度调制(PWM)便成为了调节小车行驶速度的最佳方案。脉冲宽度调制,就是按照一定的频率接通和断开电源,并根据不同的情况来改变通断电源的时间。而电机转速快慢是通过改变电机上的平均电压实现的,平均电压值可通过电压的占空比来改变。如图2所示,当电源接通时,电机运转;断开时,电机停止;通电时间越长,电机转速越快。所以,根据PWM原理对电机按频率进行通电和断电,便可实现对电机速度的精确控制。电机在接通+6 V电压下能以最快速度运转,假设在电机持续接通电源,电机的转速能达到最大,设电机两端电压为Umax,而当电源按频率通断时
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





