
资料下载


×
基于改进遗传算法在餐厅服务机器人的路径规划应用
消耗积分:0 |
格式:rar |
大小:0.79 MB |
2017-11-30
分享资料个
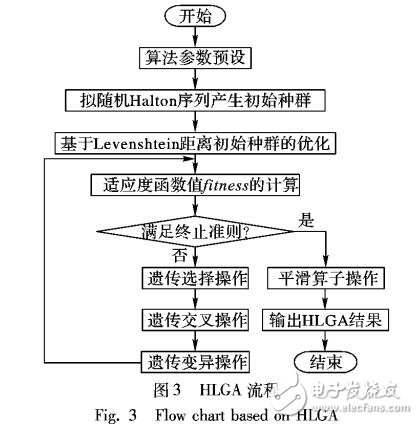
针对遗传算法(GA)易产生早熟现象和收敛速度慢的问题,提出了一种基于传统遗传算法(TGA)的改进遗传算法HLCA,用于实际餐厅服务机器人的路径规划。首先,通过基于编辑距离的相似度方法对拟随机序列产生的初始种群进行优化;其次,采用自适应算法的改进交叉概率和变异概率调整公式,对选择操作后的个体进行交叉、变异操作;最后,计算具有安全性评价因子函数的个体适应度值,进一步对比、迭代得到全局最优解。理论分析和Matlab仿真表明,与TGA和基于个体相似度改进的自适应遗传算法(ISAGA)相比,HLCA的运行时间分别缩短了6. 92 s和1.79 s,且规划的实际路径更具有安全性和平滑性。实验结果表明HLGA在实际应用中能有效提高路径规划质量,同时缩小搜索空间、减少规划时间。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





