
资料下载


×
改进区域生长的非结构化道路识别
消耗积分:0 |
格式:rar |
大小:0.84 MB |
2017-12-01
分享资料个
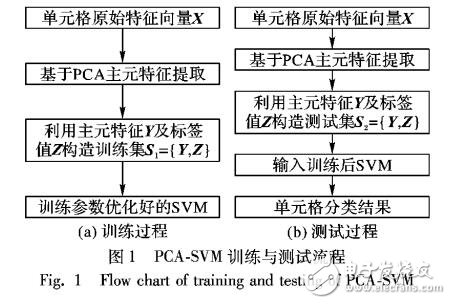
针对智能车辆在非结构化道路识别中需要采用众多的特征参数,增加了特征融合识别难度与计算复杂度,并且部分背景与道路区域存在相似性会产生道路识别的误分、误判的问题,提出了一种基于主成分分析的支持向量机( PCA-SVM)准则改进区域生长的非结构化道路识别算法。首先,对非结构化道路颜色、纹理等复杂特征信息进行提取,采用PCA对提取的特征信息进行降维;然后,利用降维后的主元特征对SVM进行训练后作为复杂道路单元格的分类器。利用道路位置、起始单元格等先验知识以及道路边界单元格统计特征改进区域生长方法,在单元格生长时利用分类器判别,排除误判区域。实际道路检测结果表明,所提算法具有较好的鲁棒性,能够有效识别非结构化路面区域。对比结果表明,所提算法在保证准确率的同时,将10余维复杂特征信息压缩为3维主元特征,相比传统算法可缩短计算时间一半以上。针对背景与道路相似区域造成的传统算法lOqo左右的误判问题,所提算法能够有效排除。在野外环境下基于视觉的局部路径规划与导航方面,所提算法为缩短识别时间、排除背景干扰提供了可行途径。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



