
资料下载


×
直流电机调速控制系统之电动摩托车控制器中的电机PWM调速器
消耗积分:0 |
格式:doc |
大小:299KB |
2017-12-18
坏天气
分享资料个
主要讲解了基于STM32的串行口的直流电机控制器设计与程序代码。
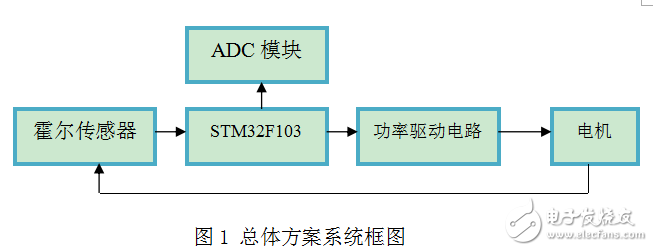
该方案主要运行状况如下:通过摩托车车把的转动来改变其机械位置,然后这个变量通过ADC转换后,传送其调速信号给STM32F103,另外,霍尔传感器将其对电机速度的检测信号也传送给STM32,在STM32中,首先根据ADC的值改变PWM波形,并且与霍尔传感器的检测信号进行叠加,最终输出叠加后的PWM波形给功率驱动电路,从而驱动电机并对其进行速度的控制和调节。
系统的硬件电路选用STM32F103为主控芯片,作为电机控制的核心,通过霍尔位置传感器检测位置信号,结合功率驱动电路以实现对电机的驱动。 此外,还有电流检测电路可根据电机的状态以调整转速和实现过流保护功能系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






