
资料下载


×
手机传感器数据在线采集与实时处理
消耗积分:1 |
格式:rar |
大小:0.87 MB |
2017-12-22
分享资料个
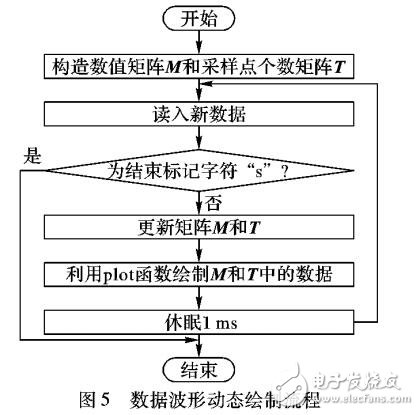
手机内置加速度传感器坐标系固定于设备自身,其采集的数据因手机姿态的改变而不断发生漂移,受此影响即使同一运动过程,加速度数据也难以同前一个时刻保持一致。为解决该问题,提出利用空间坐标转换算法将加速度数据从手机坐标系映射至惯性坐标系,从而确保数据在手机任意姿态下均能准确反映实际的运动状态。为验证该方法的有效性,设计一种手机传感器数据在线采集与实时处理新方法,实现Matlab中数据动态特征的实时观测及算法性能的在线评估。利用此方法,在旋转实验中分别测试方向余弦与四元数两种算法的可行性,并在计步器实验中进一步测试四元数算法性能。实验结果表明,基于方向传感器数据的方向余弦算法因测量范围限制,不能实现全方位空间坐标转换;而基于旋转矢量传感器数据的四元数算法则能够实现全方位转换,且转换后的加速度对步态识别率达到95%以上,较准确地反映了实际运动状态。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




