
资料下载


×
基于Kinect深度图预处理
消耗积分:3 |
格式:rar |
大小:0.91 MB |
2017-12-25
分享资料个
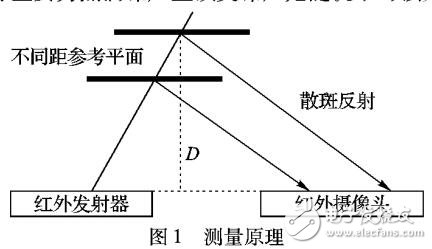
针对应用在机器人三维(3D)场景感知测量中,Kinect深度图的联合双边滤波(JBF)存在降低原始场景深度信息精确度的制约性问题,提出一种新的预处理算法。首先,通过构建深度图的测量和采样模型,得到深度图的蒙特卡罗不确定度评价模型;其次,依据该模型计算得到深度值估计区间,实现噪声点与非噪声点的判定及滤除;最后,利用估计区间均值完成噪声点的修复。实验结果表明,该算法在噪声滤波的同时保证了非噪声的不变性;非噪声的不变性以及基于估计均值的噪声修复使原始深度梯度具有不变性;与联合彩色深度图的双边滤波相比,预处理结果图物体边缘轮廓清晰不变且其均方误差降低了15. 25% - 28. 79%。因此,该预处理算法达到了提高三维场景深度信息精确度的目的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




下载排行榜
- 暂无相关数据

