
资料下载


×
磁悬浮轴承开关功率放大器数字单周期控制
消耗积分:0 |
格式:rar |
大小:1.59 MB |
2018-04-24
分享资料个
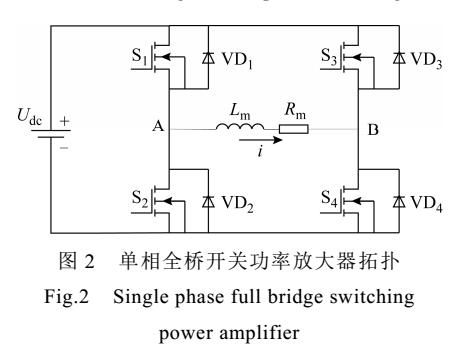
在磁悬浮轴承的开关功率放大器系统中,采用数字单周期控制算法具有算法简单、易实现、响应速度快等优点,但传统的单周期控制算法存在控制延时的缺点,会影响系统的稳定性以及功率放大器带宽。该文在考虑磁悬浮轴承线圈电阻压降的情况下,分析了数字单周期控制算法的原理,精确了算法的数学模型;结合算法原理对磁悬浮轴承控制系统的延时进行了估算,并推导了两种延时补偿模型,对延时补偿前、后的数字单周期控制算法进行了仿真与实验。结果表明:精确算法模型后的单周期控制能使实际电流波形跟踪给定波形,验证了算法的可行性;两种延时补偿模型均能使电流跟踪波形与给定波形相比基本无相位差,验证了延时补偿模型的有效性;补偿模型II跟踪效果更佳,验证了补偿模型II的优越性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




