
资料下载


×
多电机同步协调控制系统的详细中文资料免费下载
消耗积分:0 |
格式:pdf |
大小:0.51 MB |
2018-08-09
hgng--e
分享资料个
多电机同步协调系统在电机控制领域得到广泛运用,控制策略对多电机同步系统的性能起着决定性作用。针对多电机同步问题,国内外学者进行了深入研究,并提出了多种同步控制策略。综述近年来国内外提出的控制策略,对控制对象的跟踪精度、鲁棒性、抗负载能力等进行比较分析,在此基础上对多电机同步控制提出新的展望。
随着工业化和自动化程度的不断提高,多电机协调控制成为国内外学者讨论的热点。在工业领域,多电机协调控制直接影响生产的可靠性及产品质量。多电机同步协调主要有两种方式: 存在物理连接和不存在物理连接。存在物理连接的如机械方式,因其结构简单而被广泛运用。由于机械方式同步采用的是共轴方式,机械结构磨损大、控制精度不高,且传递范围和距离有限。除上述存在机械共轴方式外,其余同步控制即使是存在物理连接,但是不存在机械共轴。目前研究的多电机同步控制多是不存在机械共轴情况,主要有以下几种控制结构: 同等控制、主从控制、交叉耦合控制、虚拟主轴控制、偏差耦合控制等
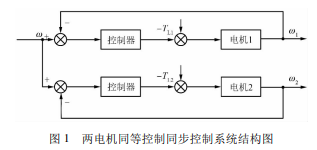
同等控制亦称并行控制。由调速控制系统给定同一速度,只有当系统中负载严格相同时才能实现同步。该控制策略着重的是理论速度与实际速度之间的误差而不是不同电机之间的误差。两电机同等控制系统结构图如图 1 所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




