
资料下载


如何使用DSP实现电动车多轮驱电机的协调控制
分享资料个
承载、转向和牵引是地面运行车辆的三大基本功能。目前纯电动汽车正在向多轮驱方向发展,这种系统至少含有两台驱动电机,通过对多电机的协调控制,不仅可实现电动车的双向牵引,而且为同时实现转向协调提供了可能。为此,本文围绕多轮驱电机的协调控制技术进行相关的理论与试验研究。
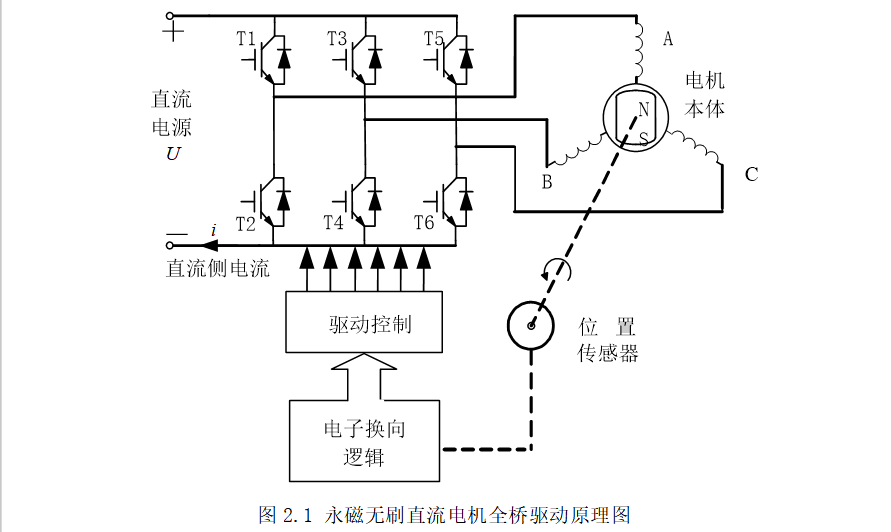
首先,对永磁无刷直流电动机的工作原理与特性进行分析;借鉴经典汽车技术,系统的研究了轮驱式电动车的控制功能及实现方法;给出一个由人工转向轮+两个驱动轮组成的电动三轮车概念模型,并提出了一种基于双电机独立驱动、电流指令灵活分配的控制系统策略。该系统接收电流调节手把指令和电流分配指令,通过双电机电流信号分配及闭环控制实现转矩协调控制,使电动车在牵引驱动的同时,实现转向协调控制。
其次,针对上述电动三轮车的控制需求,在对电机功率驱动电路结构与控制方式、电流及转子位置信号检测方法进行比较分析的基础上,设计了无刷直流电动机的硬件驱动电路,搭建了以TMS320F2812开发板为主控制器的双电机协调控制系统硬件试验研究平台;分析了控制系统软件整体需求,编写了系统输入、输出及控制模块软件,完成了双电机协调控制系统软件设计。
最后,在试验研究平台上,完成了系统软件与硬件联合调试。通过电机开环调试,标定了速度检测子系统;单独施加恒定激励电流,标定了电流检测子系统;外加可变负载,验证了电机电流闭环控制功能。调试结果表明,控制系统可实现电机启动、调速、正反转和电流闭环控制。
全部试验结果表明,基于DSP的电动车多轮驱电机协调控制可在牵引驱动的同时实现转向协调,采用成熟的电流闭环控制技术,以软件代替机械差速器的功能,可供多轮驱电动汽车的研究参考。
采用电机驱动的电动汽车最早诞生于1873年,而采用内燃机驱动的经典汽车要晚10余年。由于发现了廉价的化石能源,且电池的能量/重量比居高不下,经典内燃机驱动汽车得到了百余年的发展,给人类带来了极大的方便,但也带来了极大的污染。大约从1980年开始,人们转而积极发展电动汽车,其采用电动机作为驱动源,不仅具有较高的驱动效率,并且最大的特点是环保,所以有逐渐取代内燃机驱动的趋势。坦克及装甲车的电驱化,移动机器人的电动控制,轮轨机车的电气化都是电机驱动优势的具体体现。
传统电力驱动的电动汽车是在内燃机驱动的基础上发展而来的,采用电动机代替内燃式发动机,实现一辆车采用一台电机驱动,利用离合器、齿轮箱和差速器等一系列机械装置,实现电动机到车轮之间的动力传递。
随着电动车的发展,其电力驱动结构也出现了多种不同的形式,逐渐由传统的单电机驱动发展为多电机驱动即一个车轮采用一台电机驱动,电动机输出力矩直接通过减速器作用于车轮,使机械传动系统进一步得到减化。
最新的发展是将电动机直接装在车轮里面,使车速控制直接等同于电动机的转速控制,使多电机驱动系统结构彻底摆脱了齿轮箱和差速器等机械装置,实现了车辆底盘系统的电子化、主动化,因此多电机轮式驱动(多轮驱)电动车越来越受到人们的重视。
对多个驱动电机协调控制,电动车不仅可实现牵引功能,而且为同时实现主动或被动转向提供了可能。采用良好的协调控制策略,轨道车辆可以提高弯道牵引力,节省能源,降低噪音;电动汽车可以降低轮胎磨耗,避免车辆在转弯时发生侧滑。因此研究多轮驱电机的协调控制以保证车辆安全、高效运行具有重要意义。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





