
资料下载


如何使用555芯片设计寻光机器人毕业设计免费下载
略略略momo
分享资料个
当前,机器人的新技术、新产品大量涌现,成为新一轮科技革命和产业变革的重要驱动力,既为发展先进制造业提供了重要突破口,也为改善人们生活提供了有力支撑。而寻光机器人可以在黑暗环境中寻找光源,如洞穴探测光源。
本次课设,主要利用555芯片工作在双稳态状态,构成施密特触发器模式,通过26脚连接到两个光敏电阻之间,利用两个光敏电阻在不同光强下产生的不同分压情况,使555芯片输出管脚输出对应的高低电平,进而使两个轮子的电机的两端产生不同的电压差,由此寻光前行。通过仿真,原理图设计,PCB制作,最终完成了本次课设的所有要求,并在此功能上,加入寻黑线提示的扩展功能。
2018,智能时代已经到来,并深深地影响着现代人类的方方面面。20世纪以来,机器人技术得到迅速发展,水下机器人、空间机器人、空中机器人、地面机器人、微小型机器人等各种用途的机器人相继问世,在各行各业得到广泛应用,现如今,机器人已经发展成为一门集机械学、电子学、计算机、自动控制、人工智能、仿生学等多个学科与一体的综合学科。进入21世纪,更多先进的技术手段将被应用于智能机器人的研发制造中,而更加智能化,更加全面的机器人也会逐渐地进入人类的视野,渗透人类的生活,为人类的生产生活带来意想不到的便利。不可否认,人类的生产生活将会因为机器人的加入而变得更加方便快捷,变得更加丰富多彩。
而寻光机器人作为机器人领域的一科,对人类起着巨大的作用,故寻光机器人的研究以及制作对人类尤为主要。
对于本次寻光机器人的制作,方案各种各样,但要做到简单精确,低造价,还得加以设计,这就是本次制作要考虑解决的问题。本次课设,选用的是555定时器制作寻光机器人,成本低,制作简便,主要利用555芯片工作在双稳态状态,构成施密特触发器模式。此外通过电路仿真,原理图设计,PCB制作,再到的作品制作,最后实际作品的测试调试完成最终寻光机器人的制作。
1、 设计目的
1.1 机器人的定义
广泛的定义,机器人就是在日常生活、工业生产和科研领域中,能代替人工作的机械装置。虽然现在机器人的应用非常广泛,但是,不同国家,不同领域的学者给出的定义并不一样。最多人认可的是美国机器人协会给出的定义:机器人是一种用于移动各种材料、零件、工具或者专用装置,通过可编程程序动作来执行各种任务并具有编程能力的多功能机械手。
1.2 设计目的
通过课设,加深对《电路分析基础》、《模拟电子技术》、《数字电子技术》等课程知识的理解,进一步训练和提高工程实际应用能力,能够综合运用基础课程所学的知识,设计并制作出实际应用电路或系统。
在画原理图、PCB的时候,把CAD课程中所学到的知识运用到实际操作中,加深对DXP的理解与记忆;在制作电路板的过程中,懂得板子的制作流程;在查找资料以及设计制作寻光机器人和调试的过程中,加深对555定时器的功能的理解,掌握直流电机的运动控制原理,掌握光敏电阻的应用,并对现代机器人有一定的了解与认识。
2、 设计要求
2.1 功能要求
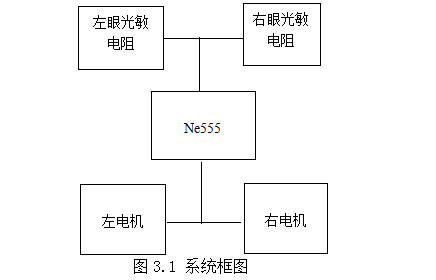
NE55工作在双稳态状态,构成施密特触发器模式。光敏电阻用来检测机器人前方的环境光。机器人的左眼与右减速电机、右眼与左减速电机,是彼此协同工作的,根据双眼检测到的环境光线的差异,由NE555驱动两只电机做差速运转,驱动小车向着光线的方向前进,车左右拐弯不同声音提示。此外可以扩展其他功能。
2.2 器件要求
两片NE555、两个光敏电阻、2个减速电动机、其他分立元件。
3、 设计方案
3.1 题目分析
寻光机器人的关键地方,在于能让电机做差速运动,电机的差速运动,则由光敏电阻检测到光强差控制,机器人的两只眼睛,用光敏电阻代替,当两只眼睛,即光敏电阻检测到左右两边的光强差时,控制两个电机做差速运动。
当左边光照强时,左电机减速,机器人向左边运动。
当右边光照强时,右电机减速,机器人向右边运动。
要控制电机做减速运动,就要控制电机两端的电压。额定电压内,电机两端的电压越大,电机的转速越大,且加在电机两端的电压方向不同,转向也会不同。
3.2设计系统框图
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





