
资料下载


×
PID有什么优缺点和设计“自抗扰控制” 技术需要使用的资料免费下载
消耗积分:0 |
格式:pdf |
大小:0.21 MB |
2018-11-06
532913
分享资料个
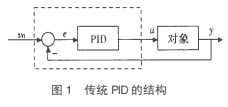
从传统 PID 的原理出发, 分析了它的优缺点。利用非线性机制来开发了一些具有特殊功能的环节:跟踪微分器(TD), 扩张状态观测器(ESO), 非线性 PID(NPID)等, 并以此组合出高品质的新型控制器-自抗扰控制器(ADRC), 从而形成了新的“自抗扰控制” 技术。 新型的控制器具有算法简单、参数易于调节的特点。
PID 控制器在工业过程控制中占据的主导地位是绝无仅有的 。目前, PID 控制器在运动控制、航天控制及其他过程控制的应用中 ,仍然占据 95 %以上。据最新的文献[ 1] 显示,在纸浆和造纸工业中, PI 控制器的应用甚至超过了 98 %。由此可见, 不管现代控制理论给出的控制方法在理论上是多么的完美而漂亮 ,可是仍然难以在现代的工业控制中找到自己的立足之处。这说明时至今日,控制理论和工程实际相脱离的鸿沟不但没有弥合的迹象,反而有了加剧的趋势 。
面对这种尴尬的局面, 我们不得不重新认识 PID 控制技术, 探索其机理, 发扬其优势, 克服其缺点 ,进而寻找更好的控制技术。本文的出发点就在于此 。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





