
资料下载


×
自抗扰控制技术的详细资料讲解
消耗积分:0 |
格式:rar |
大小:0.63 MB |
2019-11-08
分享资料个
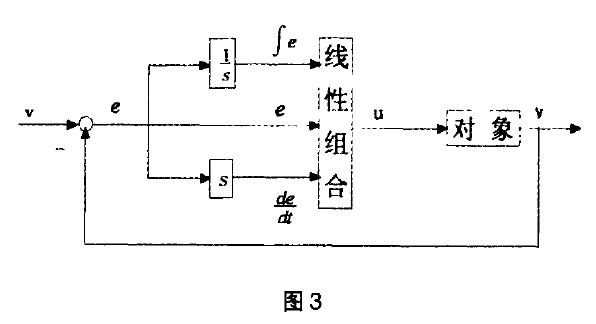
本文提出了解决控制问题的新思路:“解决控制问题是在系统运行过程中施加控制力来达到控制目的的过程的控制”的思想;介绍了如何从“发扬经典PID技术的精械,吸取现代控制理论成果,开发利用非线性特性,通过计算机平台上的仿真研究”中产生自抗扰控制技术的全过程;并介绍组成自抗扰控制技术主要子技术:跟踪微分器、扩张状态观测器、非线性反馈效应和几个有用的非线性函数。
本文简单介绍了自抗扰控制技术和它是如何从经典PID控制技术演变出新型实用控制技术的基本想法和关键技术。自抗扰控制器(Auto/Active DisturbancesRejection Controlfer,ADRC)技术,是发扬PID控制技术的精髓并吸取现代控制理论成就,运用计算机仿真试验结果的归纳和综合中探索出来的,是不依赖于被控对象精确模型的、能够替代PID控制技术的、新型实用数字控制技术。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






