
资料下载


串联机器人生产线的实验分析详细资料免费下载
THM123
分享资料个
实验目的
通过对ABB拣面包机器人生产线的加工详细视频,再通过信息检索和文献研究,分析出其系统工作总体原理及其工作过程,涉及的核心技术,包括每工艺每工位的检测和控制功能,所应用的数字式传感器的原理、结构与特性等,从而培养学生的机电工程化应用意识。
主要实验仪器(Main Experiment Apparatus)
硬件:可联互联网及登录CNKI、百度学术电脑。
软件:MS Office,绘图软件和视频播放软件。
并联机器人的功能,特点及国内外发展状况
(1)并联机器人的简介
并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
并联机器人的特点呈现为无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好。
(2)并联机构的定义
并联机构(Parallel Mechanism,简称PM),可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
(3)并联的特点
并联机器的特点:
① 无累积误差,精度较高;
② 。驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;
③ 。结构紧凑,刚度高,承载能力大;
④ 。完全对称的并联机构具有较好的各向同性;
⑤ 工作空间较小;
根据这些特点,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用。
并联机构的特点:
① 与串联机构相比刚度大,结构稳定;
② 承载能力大;
③ 微动精度高;
④ 运动负荷小;
⑤ 在位置求解上,串联机构正解容易,但反解十分困难,而并联机构正解困难反解却非常容易。由于机器人在线实时计算是要计算反解的,这对串联式十分不利,而并联式却容易实现。
并联机器人的工作原理及其工作过程
以Delta并联机器人为例,如图3.3 所示,该机器人具有4个自由度,主台、动平台、3根主动杆、3组平行四边形从动支链和动平台末端旋成。从上图可以看出,静平台的3组驱动单元通过3条相同的运动链分平台的3条边铰接。每条运动链中有1个由4个虎克铰与杆件组成的平闭环,此闭环再与1个带转动关节的驱动臂相串联,驱动臂的一一端固定上,在电动机的驱动下做一定角度的摆动,经过机械传动控制动平台白3条运动链决定了运动平台的运动特性,运动平台不能绕任何轴线旋在直角坐标空间沿X、Y、Z三个方向平移运动,到达机械结构运动空任意坐标点,末端旋转执行器安装于动平台下,执行器可实现360度。
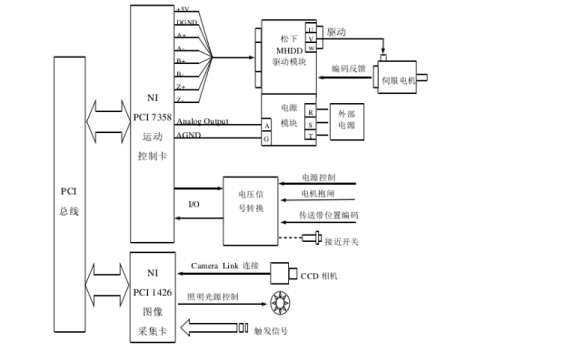
加入视觉模块时,其工作原理如下图所示。视觉控制器起核心作用,一方面采集CCD相机反馈的信息,一方面将处理的信号传输到机器人控制器上,使其到达指定位置。
完整Delta机器人的系统主要包括硬件机构,驱动控制系统,视觉识别系统和软件控制系统组成。而有的机器人本身不自带视觉系统,需另外装载该模块。现对完整系统各部分分别做介绍:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







