
资料下载


×
基于CATIA二次开发的柔性链装配技术研究
消耗积分:0 |
格式:rar |
大小:0.80 MB |
2019-01-11
分享资料个
本文基于CATIA的二次开发技术,分析、讨论并开发了柔性链自动化装配工具,实现了柔性链各链节约束配合的自动创建与DMU运动学仿真分析,为柔性链运行导轨设计提供了可行性验证方案,提高了装配设计效率,缩短了产品开发周期。
CATIA 软件设计人员为了满足高级用户的定制化工作需求,为用户预留了众多的二次开发接口,用户可使用这些接口完成自定义命令按钮、编写宏程序、自动装配等高级功能。
这些接口的开放,极大地提升了软件的易用性和拓展性,对提高工作人员的工作效率、节约研发成本和缩短开发周期有着重要作用。
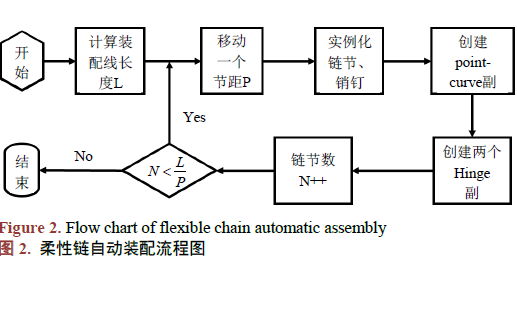
空间柔性链是一种轻型的组合立体输送系统,可以完成水平、螺旋、翻转等复杂输送形式。柔性链设计前期,在三维软件内虚拟装配耗费时间长,劳动成本高,干涉检查困难。本文旨在开发柔性链自动装配工具,保证设计的精准性,提高设计人员工作效率。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





