
资料下载


×
如何使用深度学习进行井下巷道行人视觉定位算法的详细资料说明
消耗积分:0 |
格式:rar |
大小:1.05 MB |
2019-03-28
分享资料个
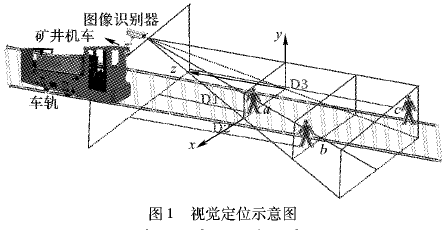
自主驾驶矿 井机车需要实时检测和定位行驶前方的巷道行人,激光雷达等非视觉类方法成本高昂,而传统基于特征提取视觉类方法无法解决并下光照差且光线不均匀的问题。提出一种基于深度学习的井下巷道行人视觉定位算法。首先给出基于深度学习网络的系统整体结构;其次,搭建目标检测多层卷积神经网络(CNN),生成自主驾驶机车前方视野范围内行人的二维坐标及边界框的尺寸;再次,通过多项式拟合计算出图像中行人到机车之间的第三维距离;最后通过真实祥本集实施模型训练验证与测试。实验结果表明,所提算法的检测准确率达94% ,速度达每秒25帧,测距误差小于4%,实现了实时高效的巷道行人视觉定位。
近年来,随着市场对驾驶安全和智能化需求的不断提高,无人驾驶巨大的社会和经济价值越发凸显,[1]。无人驾驶系统在民用、科学研究、军事、工业等方面获得广泛应用。其中在工业方面则针对具有繁重的运输任务、有事故风险的并下工作环境来代替人工来完成采矿、运输等任务。不同于一般的驾驶环境,工业轨道运输环境受井下空间和运输矿物的影响,容易导致事故的发生,且一旦发生事故极易造成人员伤亡或引发爆炸等严重后果。因此,为了从根本上减少机车运行事故的发生,杜绝人员伤亡现象的出现,有必要对无人矿井机车前方行人进行动态感知、识别分析处理,做到及时启/停和提前预警。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




