惯性测量单元(Inertial Measurement Unit,简称 IMU)是一种测量物体三轴姿态角(或角速度)和加速度的装置。陀螺仪和加速度计是惯性导航系统(INS)的核心设备。通过内置的加速度传感器和陀螺仪,IMU 可以从三个方向测量线性加速度和旋转角速度,并通过解析获得载体的姿态、速度和位移信息。
ER-MIMU-04/04迷你版使用高质量、高可靠性的 MEMS 加速度计和陀螺仪,通过RS422 和外部通信。默认波特率为 921600(可定制)。具有 X、Y、Z 三轴高精度陀螺仪,X、Y、Z 三轴高精度加速度计,可通过 RS422 输出 X、Y、Z 三轴陀螺仪和加速度计的原始十六进制补码数据(包括陀螺仪十六进制补码温度、角度数值,加速度计十六进制补码温度、加速度十六进制补码);还可输出经底层计算处理的陀螺仪和加速度计的浮点无量纲值。
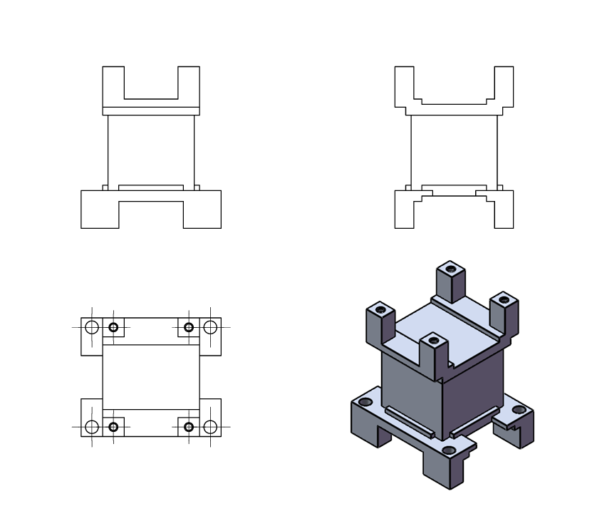
将我们的产品连接到您的系统只需简单的操作,无需使用我们公司提供的 15 针插头即可获取惯性测量单元数据。同时,由于去掉了底板外壳,我们产品的尺寸和重量可以大大减轻。
特点
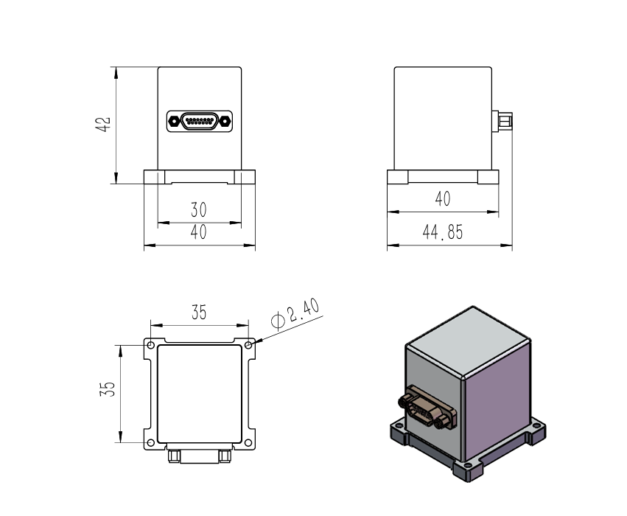
全新迷你版尺寸:40*40*42(带外壳迷你版)/27*26*34(迷你版内胎体)
重量:80 克(带外壳迷你版)/ 40 克(迷你版内胎体)
OEM 模块化设计,适用性强
-40~80°C 温度补偿
产品成本低
陀螺零偏不稳定性:1deg/hr
陀螺仪零偏稳定性 (10s 1σ):5deg/hr
陀螺仪角度随机游走:0.25 °/√h
加速度计零偏重复性:100ug
加速度计零偏稳定性(10 秒)(1σ):<50ug
加速度计二阶非线性:<100ug/g2
重量:≤100 克(内胎体)/≤220 克(带外壳)
应用
自主机器、无人驾驶车辆中的机器人控制和定位
GNSS 辅助 INS 中的方位角、姿态、位置测量和保持
无人机 AHRS 中的俯仰、横滚测量
MRU 中的运动测量和保持
IMU 中的姿态和方位角保持、定位
战术 MEMS 系统中的制导、导航和控制
卫星天线、目标跟踪系统中的稳定和指向
规格
项目 | 参数 | 单位 | |
陀螺性能 | A | B | |
量程 | 400 | 400 | deg/s |
刻度 (25°C) | 20000 | 20000 | LSB/deg/s |
刻度因子温漂 (1σ) | ±500 | ±500 | ppm |
刻度因子非线性 (1σ) | <200 | 200 | ppm |
零偏不稳定性 (1σ 25℃) | 1 | 1 | deg/hr |
零偏稳定性 (10s 1σ) | 5 | 4 | deg/hr |
角度随机游走 | <0.25 | <0.2 | °/√h |
零偏重复性 (1σ 25℃) | 5 | 4 | deg/hr |
加计性能 | |||
量程 | 30 | g | |
零偏稳定性 (10s 1σ) | <50 | ug | |
零偏月重复性(1σ) | 100 | ug | |
零偏温度系数 | <20 | ug/℃ | |
零偏温度回滞 | <1.5 | mg | |
刻度因子非线性 | <500 | ppm | |
刻度因子月重复性 | <30 | ppm | |
刻度因子温度系数 | 10 | ppm/℃ | |
刻度因子二阶非线性系数 | <100 | ug/g2 | |
刻度 | 250000 | Lsb/g | |
工作环境和供电 | |||
工作温度 | -40~+80 | ℃ | |
保存温度 | -55~+105 | ℃ | |
供电 | 6~12V DC | V | |
功耗(电压6V) | 2 | W | |
通信接口 | RS-422 | ||
物理特征 | |||
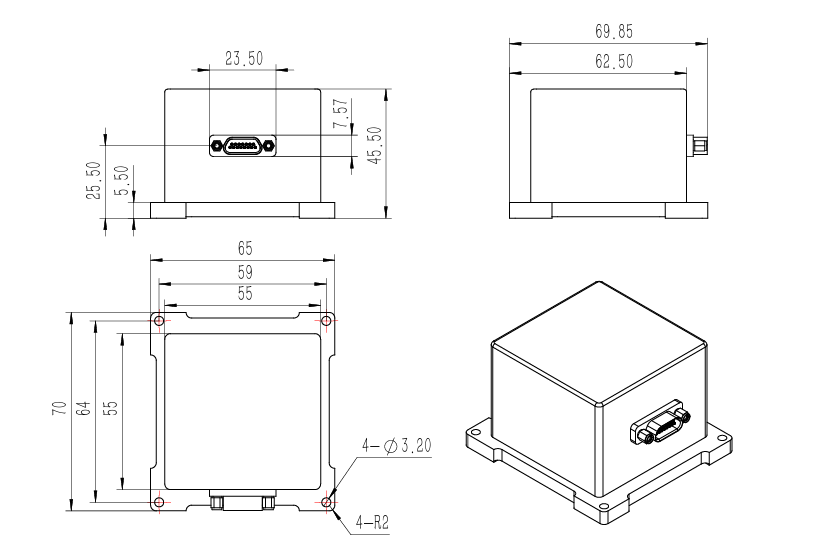
体积 | 70×65×45(带壳)43.2×43.2×35.5 (内胎体) 40*40*42(迷你版带壳)27*26*34(迷你版内胎体) | mm | |
重量 | ≤220(带壳) ≤100(内胎体) 80g(迷你版带外壳)/40g(迷你版内胎体) | g | |
尺寸
标准版
迷你版