
【CW32开发】初探四足机器人

在NVIDIA Isaac Lab中训练四足机器人运动
四足机器人足端接触检测完整代码
四足机器人测量模型介绍
四足机器人接触检测和模型
四足机器人的步态规划测试代码
四足机器人周期函数效果演示

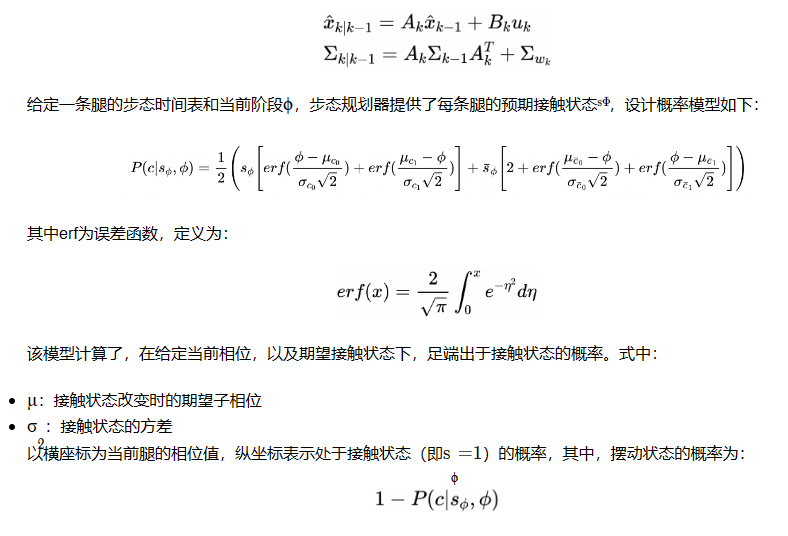
四足机器人步态规划与接触状态

工业机器人形象解构后的样子你们好奇嘛
玩嗨OpenHarmony:基于OpenHarmony的仿生四足狗开发分享

 下载APP
下载APP
 搜索内容
搜索内容
