
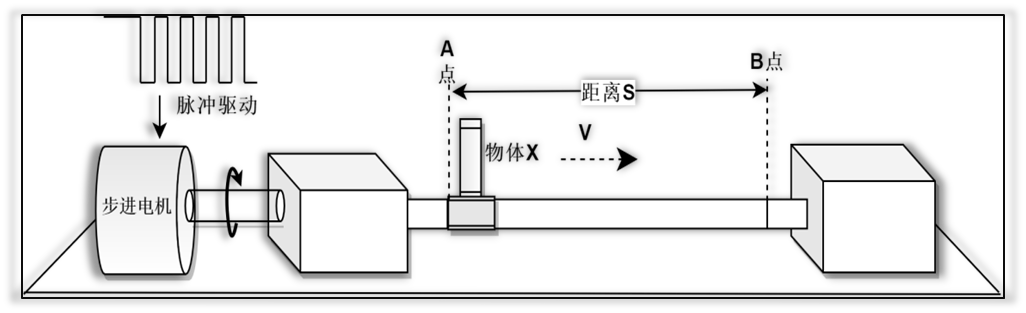
什么是S形加减速?步进电机控制算法—S形加减速运动算法介绍
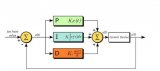
PID控制常用的参数整定方法
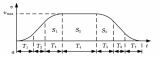
电机运动控制算法之S速度曲线规划算法

自动驾驶行车&泊车过程的纵向控制算法解析

面向行泊一体的车辆纵向控制算法简介

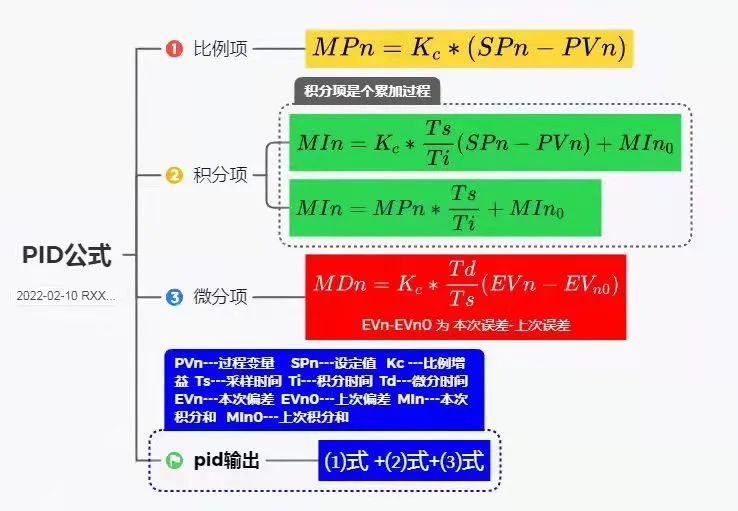
位置式PID和增量式PID的C语言实现 P、I、D各个参数的作用
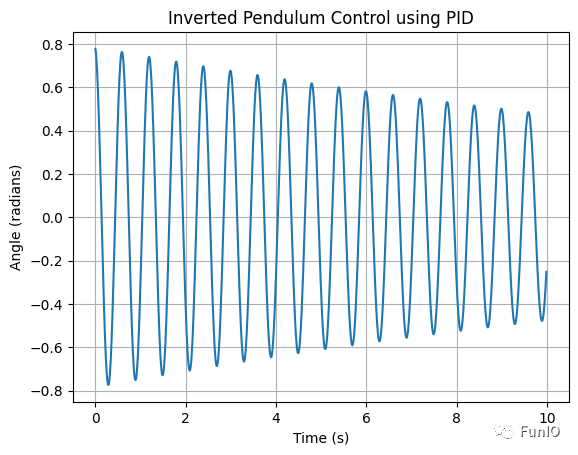
如何使用PID控制算法优化控制系统
PID中比例控制和积分控制的作用 PID的参数整定过程
什么是PID?PID算法的P、I、D部分的作用和解释

常用的回路PID控制方法讲解

机器学习超参数调试方法
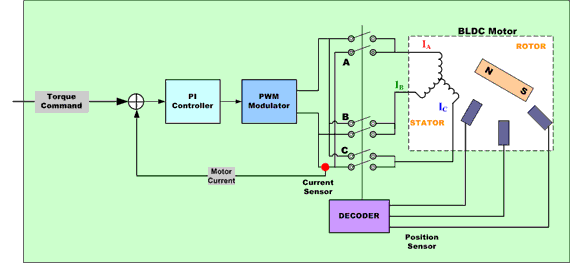
详细解读BLDC电机控制算法
Linux内核网络拥塞控制算法的实现框架(二)

PID控制算法代码 PID控制算法的原理
常用的电机控制算法详解
无感方波控制算法
虚拟空间矢量调制策略
两种实现PID控制的算法的技巧

开关电源中控制算法(二)
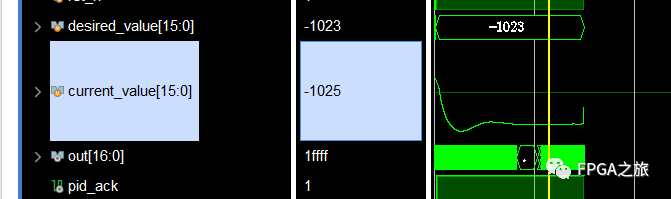
FPGA实现PID控制算法

 下载APP
下载APP
 搜索内容
搜索内容
