
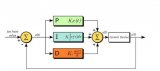
什么是pid控制原理 pid各个参数对系统的影响
pid控制中的p,i,d的概念及意义

什么是PID控制器?PID控制器积分控制介绍
智能车中电磁归一化该怎么处理
PID算法的代码实现
电磁循迹中什么是归一化
什么是滤波 常见的软件滤波办法
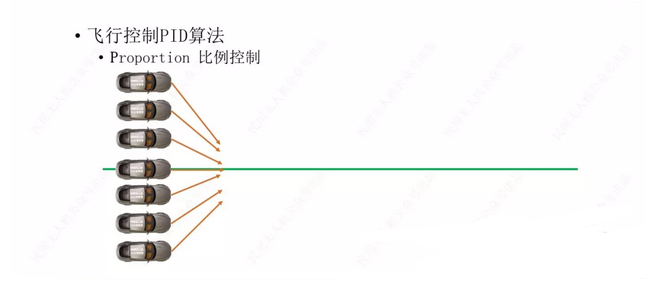
飞行控制PID算法的作用解析
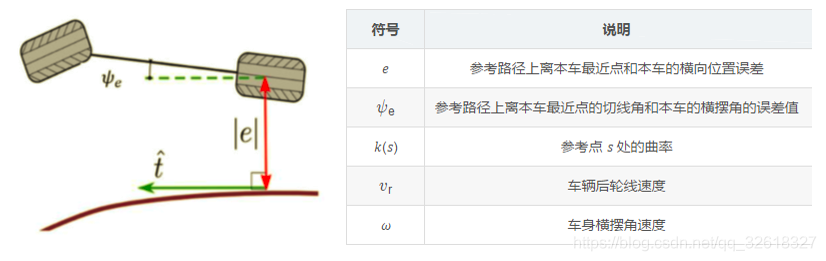
前轮、后轮反馈控制算法介绍

控制算法PID之微分控制(D)的原理和示例代码
高校实验室控制算法快速验证测试笔记

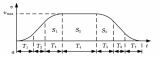
什么是梯形加减速?步进电机控制算法—梯形加减速运动算法
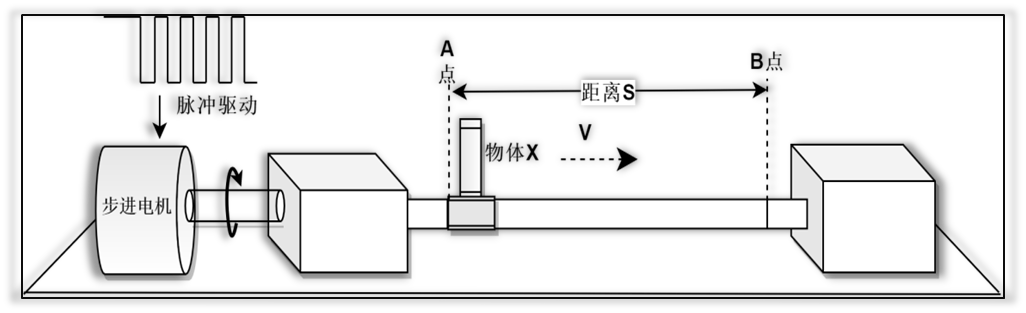
什么是S形加减速?步进电机控制算法—S形加减速运动算法介绍
PID控制常用的参数整定方法
电机运动控制算法之S速度曲线规划算法

自动驾驶行车&泊车过程的纵向控制算法解析

面向行泊一体的车辆纵向控制算法简介

位置式PID和增量式PID的C语言实现 P、I、D各个参数的作用
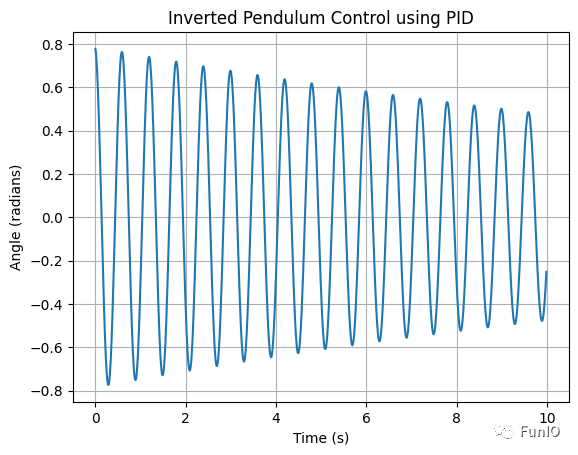
如何使用PID控制算法优化控制系统
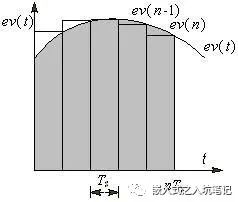
PID中比例控制和积分控制的作用 PID的参数整定过程

 下载APP
下载APP
 搜索内容
搜索内容
